



现代机器人压缩机码垛应用说明
供稿:天津罗升企业有限公司
- 关键词:罗升,机器人压缩机码垛,应用说明
1. 项目简介
1.1 项目目的
机器人代替人工将组装完成的压缩机(如下图所示),从输送线上取下放置泡沫板之中,
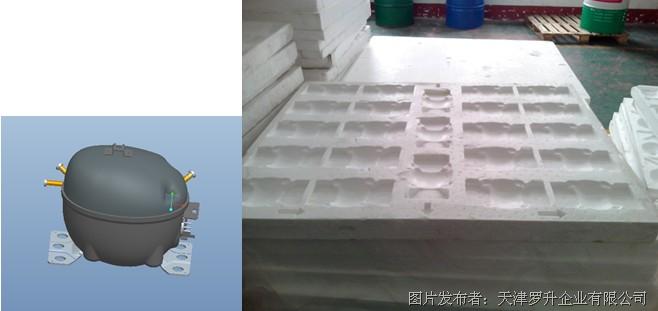
图1 工件及泡沫板
压缩机成品,重量约8Kg,生产线上每5s流出一个成品。即设流水线上每两个压缩机流出间隔时长为t0,机器人从原点至流水线上指定抓取位置时间为t1,吸起成品至泡沫板指定位置时间为t2,放好产品回原点时间为t3,则必须满足
t1+t2+t3<t0 (5s)
且压缩机成品与泡沫板间的定位误差需要控制在±1mm(X方向)和±2mm(Y方向)以内,泡沫板长1800×840×65MM
1.2 技术要求
① 本方案实现下料全自动工作流程
② 满足生产线节拍的要求
③ 机器人夹取物品动作要确保正确、到位,卡爪夹持工件不能造成包装造成损伤;
④ 夹具具有位置确认开关;
⑤ 确保一次取放一个工件和取放的准确性。
⑥ 配合包装生产线的生产节拍,保证工作效率;
⑦ 控制系统具有控制异常、急停等故障显示和报警功能;
2. 作业流程说明
2.1布局图

2.2工作流程
1、 机械定位
在生产线上安装定位气缸 ,首先将第一个工件定位,接着第二个气缸进行第二个工件的定位,
2、 抓取
机器人到工作位置同时抓取两个工件,
3、 放置
在一般位置同时放置两个工件,由于泡沫板采用5*5的安放方式,所以在第五个工件需要先放一个,再放另外一个,
4、 更换泡沫板
2.3控制模式分类
1、 自动模式
机器人自动上下料可以实现自动上下料生产,需要人工进行物料的输送工作。
2、 手动模式
操作者借助人机界面或机器人示教手动完成机器人抓取、放置等操作
3、 紧急模式
在运行过程中紧急情况发生,所有设备立即停止运行,进入紧急停车模式
4、 错误模式
当发生出错信号后,系统进入错误处理程序,可以根据客户设定的流程处理,并且在人机界面上显示错误信息。
5、 模拟运行模式
此功能用于测试,在此功能下机器人和控制系统能够忽略部分输入信号,模拟整个生产流程,以检验设备动作是否正常。
3. 系统组成

表1系统组成
4. 设备技术规格
4.1机器人说明
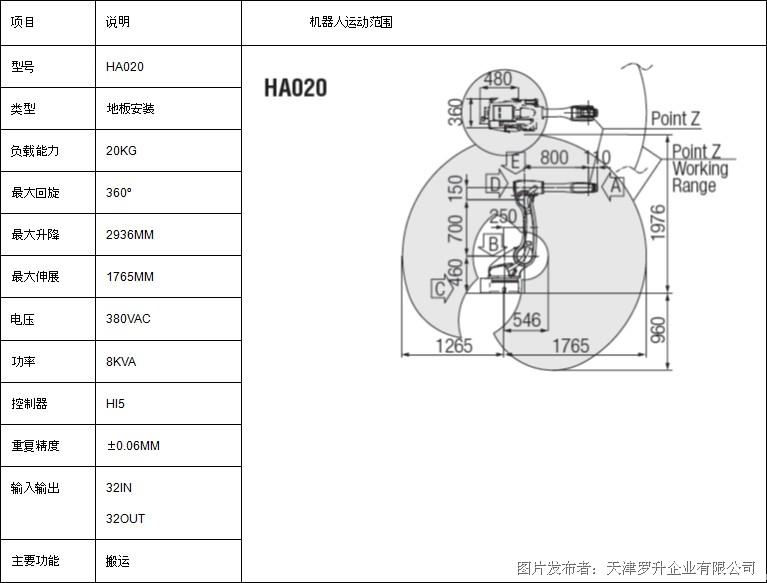
表4机器人详细机械参数
4.2夹具说明
采用专用真空吸盘式来夹持工件,手爪的集成由罗升负责设计制作。
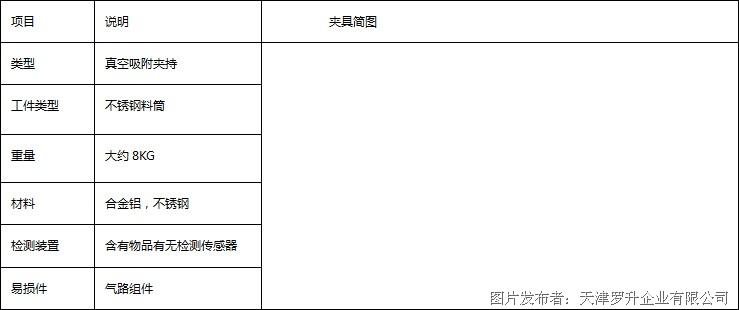
表5夹具样式及参数
4.3机器人控制柜说明
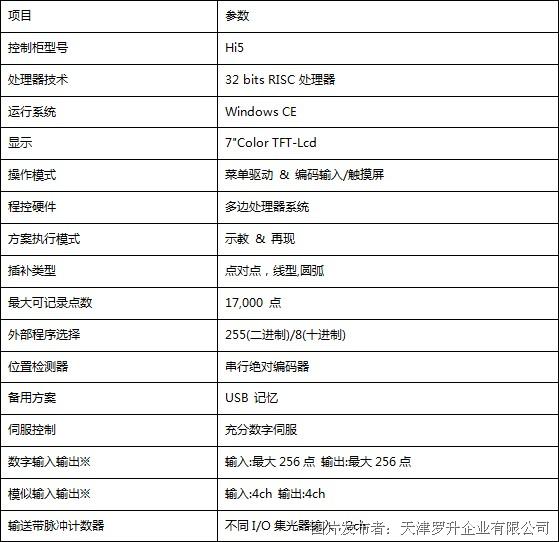

表5机器人控制柜参数
4.4示敎器规格

表6 示教器参数
4.5 控制系统及PLC说明
采用三菱逻辑控制器(PLC )进行系统逻辑控制。完成对机器人、操作按钮、触摸屏和指示灯、安全光栅和安全门开关等各种外设的通讯控制工作。
人机界面采用海泰克彩色触摸屏,编制良好的人机界面,完成生产管理、状态管理和维护管理等工作。
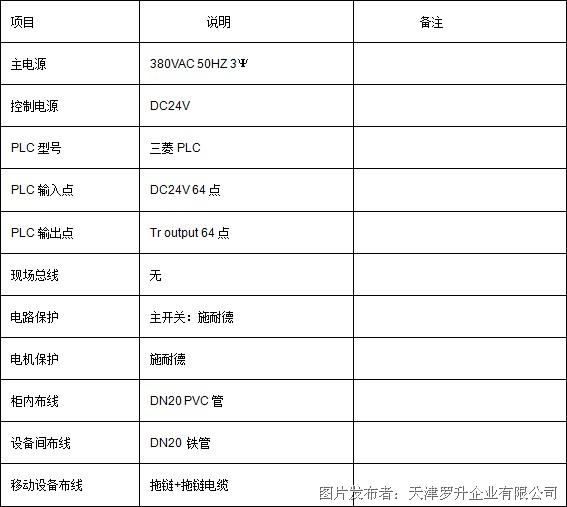
表8 控制系统参数
5. 设计优点
1、节约人工,降低劳动强度,每个压缩机中8Kg,每5S搬运一次,劳动强度非常大
2、提高产品的一致性
3、示范项目,为后续的机器人在本行业应用打好基础