


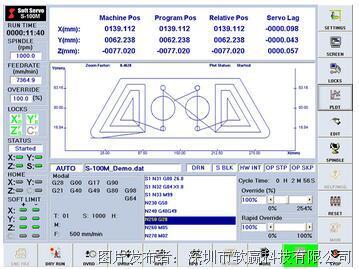
SoftServo(软赢)S140M- EtherCAT通用数控系统
供稿:深圳市软赢科技有限公司
关键字:S140M,,数控系统
- 产品简介:
- S140M是基于开放的软件平台的,在Windows环境下编程的,基于EtherCAT总线和软件运动控制的创新型的通用数控系统,最多可以控制16轴,支持标准G代码、软PLC和宏程序,支持五轴联动、高速高精、法线切割和龙门同步。
产品介绍
分类:数控系统
简介:S140M是基于开放的软件平台的,在Windows环境下编程的,基于EtherCAT总线和软件运动控制的创新型的通用数控系统,最多可以控制16轴,支持标准G代码、软PLC和宏程序,支持五轴联动、高速高精、法线切割和龙门同步。
编号:3S-S140M
产品详情
S140M - 基于开放纯软件平台的EtherCAT通用数控系统



概述
S140M是基于开放的软件平台的,在Windows环境下编程的,基于EtherCAT总线和软件运动控制的创新型的通用数控系统,最多可以控制16轴,支持标准G代码、软PLC和宏程序,支持五轴联动、高速高精、法线切割和龙门同步。此外,开发者可以获得S140M源码示例,通过调用超过100个API运动控制函数,对数控系统进行灵活定制。S140M可以应用于各种数控机床、激光切割、水刀等设备。用户可以根据自己的数控机床的工艺要求,在S140M的软件平台上使用API函数、标准G代码、宏程序、PLC等开发出独特的、定制化的数控系统。
S140M功能特点
3轴(S100M)、4轴(S120M)、5轴(S140M)联动控制。
最多可控制16根伺服轴(可使用的轴代号XYZUVWABCDE)。
主轴具有C轴功能,可定位和攻丝。
刚性攻丝功能。
龙门式同步轴功能(适用于S120M和S140M)。
软件PLC功能。
各种钻孔和镗孔固定循环。
标准G代码定义,每秒可处理1000程序段。
伺服控制周期:0.5-1ms。
刀具长度补偿和刀具半径补偿(几何/磨损);自动刀长测量功能。
螺距补偿功能。
宏程序功能。
工件坐标系G54-G59,G54.1 P1-P58。
支持各种刀库宏程序:斗笠式、刀臂式、伞式和排式。
程序段搜索:可通过N、T和M码搜索指定的程序段;搜索到目标程序段后,系统将自动更新并移动到之前的编程位置。
规格


转角加减速控制
在到达转角前减速,转角之后保持高速,实现更锋利的转角效果和高精度;
可通过参数定义减速的转角角度和速率,并可指定是否进行到位检查,以达到更高的精确度;
3D动态前瞻轮廓控制(3D-DLACC)
高速高精加工时预处理1000程序段进行预插补;
圆弧插补速度控制
根据圆弧半径和最大允许的机械加减速来自动调整/降低圆弧插补速度,来满足特定的圆弧轨迹精度。

法线方向控制和斜边切割
控制带旋转轴的刀具一直保持与其刀路的垂直和法线方向;
可应用于旋转的斜边切割;
极大的简化了等离子和激光切割中常见的旋转斜边形状的刀路编程;
象限突起补偿
可补偿和优化当轴反向时误差所引起的象限突起和不均衡,达到更好的切削精度和光洁度;
应用于圆弧补偿和“V”型切削;
直线度补偿
可补偿轴全长的直线度误差;
可补偿轴间的垂直度误差;

刀具中心点控制(TCP)
不需要在每个零件程序中计算各轴的实际位置值;
自动计算和补偿各轴实际位置值和刀具中心点的距离,使得刀具中心点按编程指令和速率移动;
极大的简化了复杂工件的刀路编程;
支持的4轴和5轴结构

软PLC规格
使用梯形图语言编辑和监控。
最大40000步,每步执行时间0.07µs。
PLC扫描周期可定义为1-5ms。
独立操作的PLC轴功能。
PLC内核可与运动控制内核进行状态和命令的互操作。
