


检索条件
产品/系列:
点击选择产品分类
点击选择产品系列


WMX软件最多可以控制64根伺服轴,最大256个通道,提供500多个API函数和众多开发示例[查看更多]
人气:4329口碑:1星级:
时间:2016-09-30
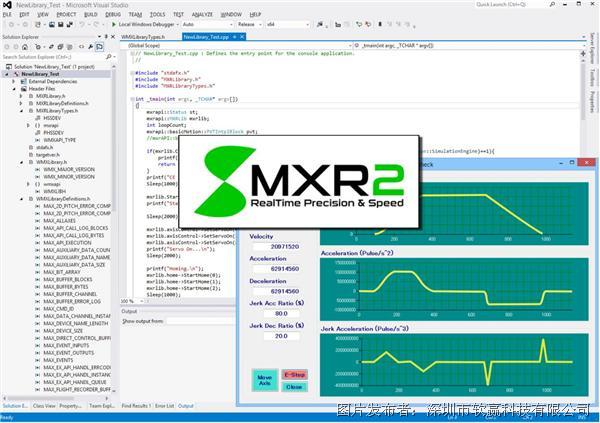
MXR2是WMX2的高级版本,包含RTX SDK的实时开发和编译环境,可以让开发者在实时环境下使用C++编写实时算法,对500多个运动函数进行实时的调用和执行。[查看更多]
人气:1641口碑:0星级:
时间:2016-09-30
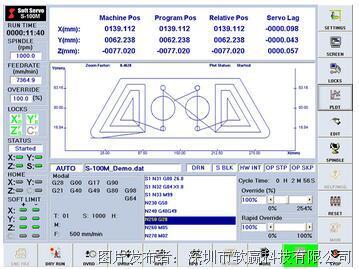
S140M是基于开放的软件平台的,在Windows环境下编程的,基于EtherCAT总线和软件运动控制的创新型的通用数控系统,最多可以控制16轴,支持标准G代码、软PLC和宏程序,支持五轴联动、高速高精、法线切割和龙门同步。[查看更多]
人气:2801口碑:0星级:
时间:2016-09-30

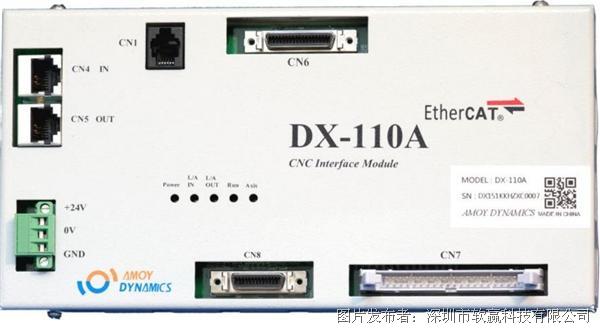
用于将EtherCAT数字信号转换成脉冲信号来控制通用伺服驱动器或步进驱动器。上有4个通用伺服接口,采用位置控制模式,可获得编码器反馈。[查看更多]
人气:1797口碑:0星级:
时间:2016-09-30
通过EtherCAT总线与S140M控制系统连接,提供模拟量主轴0~10V接口,5V脉冲手轮接口和16输入/16输出接口(一般用于连接操作面板)[查看更多]
人气:785口碑:0星级:
时间:2016-09-30

通过EtherCAT总线与S140M控制系统连接,提供EtherCAT数字IO接口,共有32输入/32输出,采用40PIN牛角头接口,可外接分线器和继电器模块[查看更多]
人气:544口碑:0星级:
时间:2016-09-30

J190无风扇嵌入式电脑,可以用于安装SoftServo软件控制系统WMX2/MXR2/S140M/RMX,将其变成一台通用自动化控制器、数控系统或机器人控制器。[查看更多]
人气:776口碑:0星级:
时间:2016-09-30

RMX是基于EtherCAT总线和软件运动控制的创新型的多机器人协作控制系统。RMX可以实现在一个PC的多核CPU上对多台机器人进行独立或者同时的高效协同控制,无需多台的机器人硬件控制器。[查看更多]
人气:1122口碑:0星级:
时间:2016-09-30

建议使用Intel i210网卡配置为RTX实时设备,为EtherCAT通讯提供稳定的连接与数据传输[查看更多]
人气:1334口碑:0星级:
时间:2016-09-30
总数:9 | 当前第1/1页首页上一页1下一页尾页
相关产品推荐<<更多工控网企业会员