


SoftServo(软赢)MXR2-通用运动控制系统(实时编程)
供稿:深圳市软赢科技有限公司
关键字:运动控制系统,MXR2,SoftServo
- 产品简介:
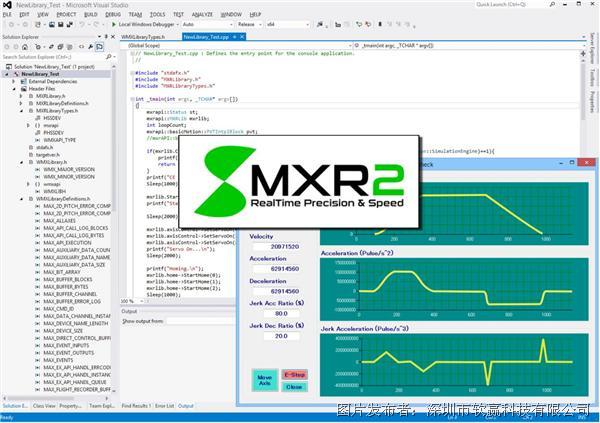
- MXR2是WMX2的高级版本,包含RTX SDK的实时开发和编译环境,可以让开发者在实时环境下使用C++编写实时算法,对500多个运动函数进行实时的调用和执行。
产品介绍

分类:通用运动控制系统
简介:MXR2是WMX2的高级版本,包含RTX SDK的实时开发和编译环境,可以让开发者在实时环境下使用C++编写实时算法,对500多个运动函数进行实时的调用和执行。
产品详情
MXR2 - 使用RTX实时环境编程的EtherCAT通用运动控制系统
概述
WMX2是在Windows环境下编程的,基于EtherCAT总线和软件运动控制的创新型的高端的通用运动控制系统,最多可以控制64轴,256个独立的运动控制通道/线程,有超过500个运动控制函数,包含EtherCAT网络管理的函数。
MXR2是WMX2的高级版本,包含RTX SDK的实时开发和编译环境,可以让开发者在实时环境下使用C++编写实时算法,对500多个运动函数进行实时的调用和执行。具体的运动控制的功能与特点可以参考WMX2的规格。
注意事项与应用
I. 使用Viusal Studio C++编程
II. 需要RTX SDK,对编程开发有较高要求(掌握RTX实时编程、共享内存管理等)
III.适用于用户的核心实时算法的封装,如
① 抑制振动
② 防碰撞检测与处理
③ 异形机器人正反解算法
④ 用户自定义加减速曲线-Cyclic Buffer
V.可调用实时相机类库-Matrox Imaging Library (MIL)
MXR2架构

WMX2与MXR2的比较

发布时间:2016年9月30日 11:48 人气: 工控网审核编辑:陈磊
更多详细请访问:深圳市软赢科技有限公司