


MOTEC SD388B智能驱动器在贴标机上的应用
- 关键词:步进驱动器,驱动器,智能步进驱动器
- 作者:北京阿沃德自动化设备有限责任公司
- 摘要:SD388B 智能型三相混合式步进驱动器是MOTEC(中国)独立自主研发,具有完全自主知识产权的新型智能步进驱动器, SD388B 智能步进驱动器采用伺服原理工作,用于驱动SM3系列0.4 ~ 6Nm 的的三相混合式步进电机。SD388B 智能步进驱动器内置控制功能,具有I/O 接口,支持多种控制网络,并能够通过编程独立运行。
1. 概述
随着科技的不断进步,包装市场逐步扩大,技术的研发也不断完善,贴标机也得到了广泛的应用。贴标机的应用已经不仅仅局限于食品、化妆品、医药等传统的行业,还在电子产品、五金产品、玩具等行业都有了贴标机的一席之地,范围应用的逐步广泛让贴标机成为应用非常广泛的生产设备。
图1 显示了平面贴标机示意图,图中显示传动轴有2 轴,分别是传送带轴和标签驱动轴,传送带轴用于被贴物体的输送,标签驱动轴用于驱动标签。另外有两个传感器,分别是色标传感器,用于标签带的定位;另一个传感器为被贴物零位传感器,用于检测被贴物体的到来。
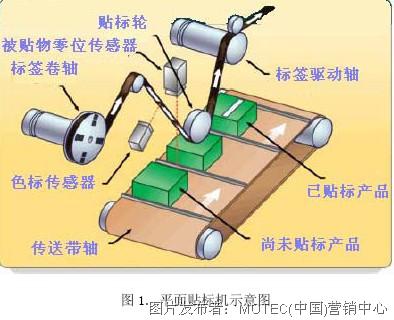
工作过程的开始是被贴物在传送带上以一个不变的速度向贴标机进给。机械上的固定装置将箱子之间分开一个固定的距离,并推动箱子沿传送带的方向前进。标签带驱动轮间歇性地拖动标签带运动,标签带从卷轴中被拉出,同时经过贴标轮贴标轮会将标签带压在被贴物上。标签是在贴标轮与被贴物移动速度相同的情况下被贴在箱子上的。当传送带到达了某个特定的位置时,标签带驱动轮会加速到与传送带匹配的速度,贴上标签后,再减速到停止。由于标签带有可能会产生滑动,所以它上面有登记标志,用来保证每一张标签都被正确地放置。登记标志通过一个传感器来读取,在标签带减速阶段,驱动轮会从新调整位置以修正标签带上的任何位置错误。
2. SD388B 的特点
SD388B 智能型三相混合式步进驱动器是MOTEC(中国)独立自主研发,具有完全自主知识产权的新型智能步进驱动器, SD388B 智能步进驱动器采用伺服原理工作,用于驱动SM3系列0.4 ~ 6Nm 的的三相混合式步进电机。SD388B 智能步进驱动器内置控制功能,具有I/O 接口,支持多种控制网络,并能够通过编程独立运行。
其特点如下:
输入直流电源 18VDC~80VDC;
★ 输出相电流 0~8A;
★适用三相混合式步进电机;
★丰富的操作模式
- 网络指令模式;
- 脉冲/方向模式;
- 模拟信号模式;
- 独立运行模式;
- 双脉冲模式;
★ 控制模式
- 位置控制模式;
- 速度控制模式;
★ 先进的控制技术
- 输入信号平滑处理,自动微步计算,即使在低细分下也能保证平滑运行;
- 抗共振算法,抑制系统中的中频共振;
- 低速波形平滑算法,抑制低速力矩波动;
★ I/O口设置:8个隔离数字输入口(其中2个为高速输入口),3个隔离数字输出口,1
个 0~ 5V模拟量输入口;
?? 网络指令模式有RS232、RS485和CAN总线模式,3种通讯方式都支持多台驱动器组网
控制的操作模式:
RS232: 8台联网;
RS485: 31台联网;CAN总线:110台联网;
★ 通过网络通讯利用MotionStudio上位机软件能方便地进行驱动器参数调整、控制和
在线监测等功能;
★ 集成标准MODBUS协议,可以方便地与多种上位机联接;
★ 支持标准CANOPEN协议;
★ 支持控制参数保存和报警历史记录功能;
★ 支持无需上位机的独立运行模式(独立运行模式的运动程序由MotionStudio步进版
编写编译完毕后下载到驱动器,而有驱动器的I/O触发程序的运动);
★ 运动控制、电机驱动和PLC 功能集成一体;
★ 提供PC上位机动态库,用于上位机应用程序编写;
★ 提供上位机动态库MotionLib和命令集用于上位机应用程序编写;
MOTEC系列三相混合式智能步进驱动器集运动控制、步进驱动和集成PLC功能于一体;
这对于提高系统整体响应性能和可靠性带来了很大的帮助。
★ 丰富的操作模式
MOTEC 系列三相混合式智能步进驱动器有丰富的控制功能,包括网络指令模式、脉
冲/方向模式、模拟信号模式、独立运行模式和双脉冲模式。
★ 独立运行模式
MOTEC系列智能步进驱动器脱离上位机运行的独立运行模式。在独立运行模式下,
用户可以通过PC上的调试软件编写用户程序并编译下载到驱动器,驱动器可以根据
I/O口的状态触发或停止电机的运行。在独立运行模式下,驱动器上的I/O口逻辑都
是可以由驱动器控制的。
总线功能
MOTEC系列智能步进驱动器支持RS232/485/CAN总线,总线可以用来连接PC、HMI、
PLC或其它专用运动控制系统,3种总线都支持多台驱动器联网。总线功能更易于用
户组建分布式运动控制系统,并具有更好的系统可扩展性。
支持MODBUS和CANOPEN标准协议
MOTEC系列智能步进驱动器支持标准的MODBUS和CANOPEN协议,更易于用户组建分布
式运动控制系统应用。
动态函数库
当用户使用PC机作为上位机时,可以利用我们提供的动态链接库编写应用程序。动
态链接库将各种运动命令封装于函数库内,用户很方便的在PC机上编写应用程序。
调试软件
MOTEC系列智能步进驱动器提供MotionStudio调试软件,用于驱动器参数设置、测
试、试运行,驱动器内部数据获取和图形化分析等功能。
细分精度高
MOTEC系列步进驱动器设有用户任意可调的角度恒力矩细分,最高分辨率达60000
步/转
高速不失扭双极恒流斩波方式使得相同的电机可以输出更大的速度和功率,增大了高速扭矩,
力矩/转速曲线拐点后移。
低速运行平稳
MOTEC系列步进驱动器具有优良的低速特性,即使转速低至5分钟一圈,仍能够平稳
运行,无爬行现象。
保持电流可调
MOTEC 系列智能步进驱动器的保持电流可以在1%到100%范围内可调,用于减少电机停
止情况下电机的发热。3. 系统结构图
图2 给出了SD388B 智能步进驱动器平面贴标机方案的系统结构示意图。从图中可以看
出,除了SD388B 和变频器之外,系统没有专门的控制器或PLC,所有的控制功能均由SD388B智能驱动器完成。 系统的特点如下:1). HMI 和SD388B 之间用RS232 或RS485 通讯,MODBUS 协议;
系统的特点如下:1). HMI 和SD388B 之间用RS232 或RS485 通讯,MODBUS 协议;
2). 变频器由SD388B 的3 个光电隔离输出口控制,包括启动/停止和速度选择,其中速度选
择有两个输出口状态控制;
3). SD388B 的4 个输入口分别用于 色标传感器、被贴物传感器、启动/停止、急停控制;
4). 所有的参数均可通过HMI 设置,设置内容包括:
- 细分;
- 电流等级、半流电流、半流延时;
- 电机被转标签进给量;
- 加速度、减速度;
- 贴标速度、标签长度;
- 贴标延时、贴标计数器;
- 变频器高速/低速选择、变频器启动/停止控制;
- 计数器清零;
- 启动/停止贴标.
4. 功能实现
图3 给出了送标轴的在一个贴标过程中的速度运动曲线,其贴标过程描述如下。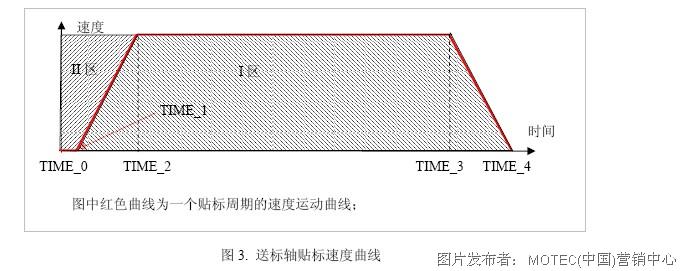 ?? 时间轴:
?? 时间轴:
TIME_0: 检测到被贴物到来;
TIME_1: 经过一定时间的延时后送标轴开始运动;
TIME_2: 送标轴进入匀速运动阶段;
TIME_3: 检测到色标信号,送标轴开始减速;
TIME_4: 送标轴停止运动;?? 贴标过程:
1). TIME_0 检测到被贴物到来,系统延时到TIME_1 送标轴开始运动;
2). TIME_2 加速到匀速运动,其速度和传送带的速度一致。,此时标签和被贴物接触,
开始贴标;
3). TIME_3 检测到色标信号,送标轴开始减速,直至停止运动;
4). 如果是开机第一次运动,那么TIME_0 可以看作开机送标轴的启动时间;
?? 注意事项:
1). 在保证运动平稳前提下,减速度值应尽可能大,以保证停止的位置尽量靠近检测到
色标的位置;
2). 送标轴匀速运动的速度和传送带的速度一致,保证贴标质量;
3). 标签接触被贴物的时机的控制;
- 加延时,即检测到被贴物后延时一定时间开始运动;
- 调整加速度,调整加速度即可控制标签的前进速度,从而控制标签和被贴物接触
的时间点;
图3 中II 区表示从贴标开始到结束这段时间中送标轴走过的距离,也就是一个标签长
度的距离。而I 区表示从检测到被贴物到标签接触到被贴物时间段传送带轴走过的距离,可
以用来调整标签贴到被贴物上的位置偏移量,具体计算距离如下:
ΔLength = V � ΔT ? � a � V (1)
式中,V 表示传送带轴的运动速度(送标轴匀速运动速度与此相同),a 表示送标轴的加速度
值, ΔT 表示检测到被贴物到送标轴开始运动的时间延时。 因此可以用ΔT 和a 来调整
ΔLength ,从而调整贴标签的偏移量。
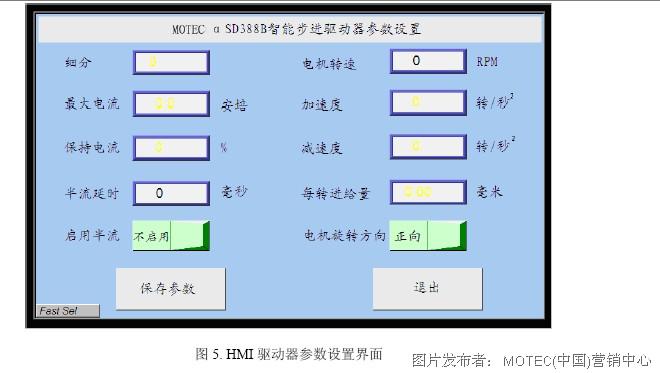
5. HMI 界面设计
本解决方案的操作除了启动运行和急停用外接按钮之外,其他操作全部通过HMI 完成,
其界面设计如图4 和图5 所示。

 6. 总结
6. 总结
本文给出了智能步进驱动器在平面贴标机上的应用方案,在本方案中,所有的贴标功
能均由智能驱动器完成,具有如下的优势:
1). 没有专门的控制器或PLC,系统结构更清晰,同时更能节省成本;
2). 色标传感器和被贴物传感器通过高速I/O 口连接到智能驱动器,具有很高的快速响
应特性;
3). 智能驱动器和HMI 直连,用于设置系统参数,MODBUS 协议更易于编程;
4). SD388B 智能驱动器强大的功能更有益于系统的功能扩展。
我们另提供高配置的MOTEC智能交流伺服的贴标解决方案。
贴标:一个启动信号,一个色标信号,两个信号都为高速输入口,
检测被贴物信号作为启动信号,检测到后伺服送标,送标过程中检测到色标后走一个预设的位置停止
优点:1、采集信号非常块,几个微秒的检测时间
2、如果用外部控制器,采用脉冲控制伺服,当检测完色标后PLC发固定脉冲,伺服停止,但没有考虑检测色标时伺服内部有跟随误差,这个值随速度、增益等因素会变化,影响送标的准确性
3、功能内置,通过内置PLC调用,并完成其它相应功能,节省成本。