


机器视觉运动控制一体机应用例程|柔性电路板自动上料解决方案
供稿:深圳市正运动技术有限公司
- 关键词:视觉运控,运动控制器,电路板
- 作者:正运动
- 摘要:目前传统的柔性电路板上料,还主要依靠人工逐个摆放上料,极大影响了生产效率 ,且用人成本高。随着电子产业高速发展,柔性电路板产能需求也随之增长。
一、应用背景
柔性电路板是以聚酰亚胺或聚酯薄膜为基材制成的一种拥有高度可靠性,绝佳可挠性的印刷电路板。具有配线密度高、重量轻、厚度薄、可自由弯曲折叠的特点。
柔性电路板可以很好地适用于连续运动、定期运动的内部连接系统,或需要缩小体积和重量的电子产品。 因此,柔性电路板在航天、移动通讯、 3C电子 、数字相机等领域上得到了广泛的应用 。
柔性电路板往往形状尺寸各异 ,同时 柔性电路板板子较柔软,且重量轻。因此柔性电路板必须摆放在对应的多个物料限位槽料盘上, 以完成柔性电路板的固定、运输 和加工 。

目前传统的柔性电路板上料,还主要依靠人工逐个摆放上料,极大影响了生产效率 ,且用人成本高。随着电子产业高速发展,柔性电路板产能需求也随之增长。
所以采用传统人工上料已无法满足柔性电路板的产能需求,因此柔性电路板自动上料已俨然成为产业发展的必然趋势。所以如何自动将柔性电路板批量平稳、高效地传递到下一个工序中的指定位置,仍是目前企业需要解决的问题。
为解决上述问题,正运动技术通过图像处理技术进行自动阵列匹配定位,获取料盘上多个柔性电路板的位置,从而替代传统人工上料,实现柔性电路板平稳高效自动上料。
上期课程,我们讲述了在机器视觉方案中端子裁切检测的应用,本期课程我们将和大家一起分享如何去实现柔性电路板自动上料。
教学视频
二、检测原理
(一)检测需求
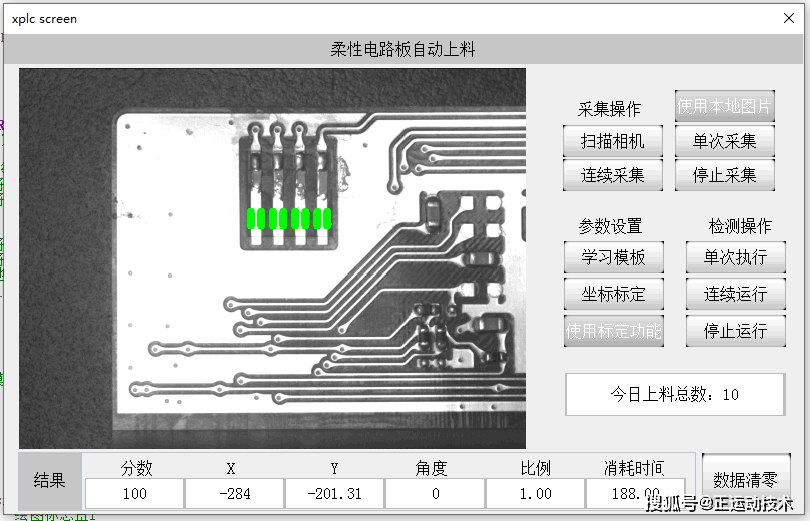
1.局部匹配定位柔性电路板的位置,输出其坐标给机械手。之后机械手再从进料单元吸取柔性电路板摆放到加工位置上。
2.主界面显示柔性电路板的位置信息和统计今日上料总数。
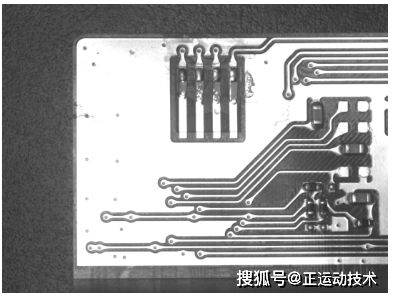 样品图
样品图
 柔性电路板自动上料示意图
柔性电路板自动上料示意图
(二)软件算法
先使用学习模板创建柔性电路板的形状模板,接着将形状模板位置结果作为基准位置。
然后进行九点标定,将我们的像素坐标转换成世界坐标系。
最后将标定后匹配定位出来柔性电路板的位置信息显示出来,并统计当天上料总数。
(三)课前准备
1.电脑一台,安装ZDevelop3.10.07版本软件
2.VPLC516E一台
3.24V直流电源一个
4.网线若干
5.电线若干
三、软件实现
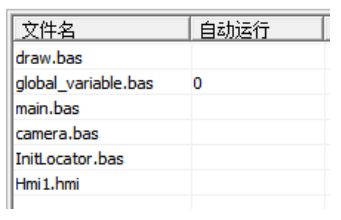
1. 打开ZDevelop软件:新建名称为“柔性电路板上料定位.zpj”项目→新建“HMI”文件→新建“main.bas”文件 (用于编写界面响应函数) →新建“global_variable.bas”文件 (用于存放全局变量并开启HMI自动运行任务) →新建“InitLocator.bas”文件 (用于初始化匹配参数) →新建“draw.bas”文件 (用于更新绘制ROI数据) →新建“camera.bas”文件 (用于实现图像采集功能) →文件添加到项目。
2.设计HMI界面。
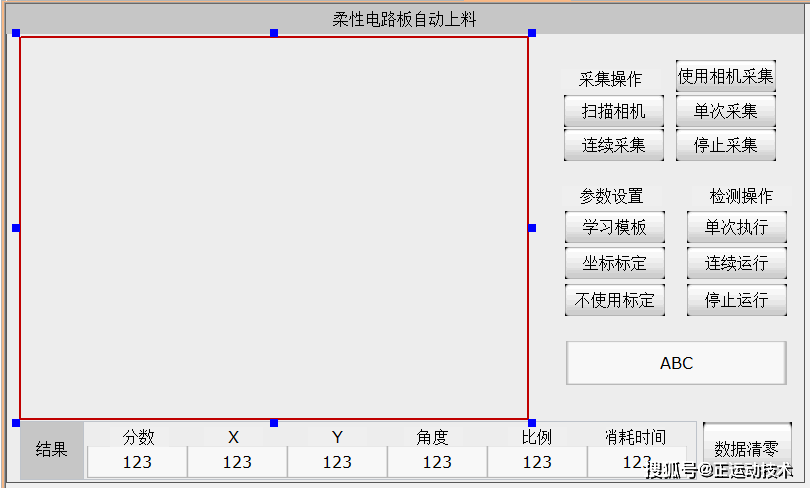
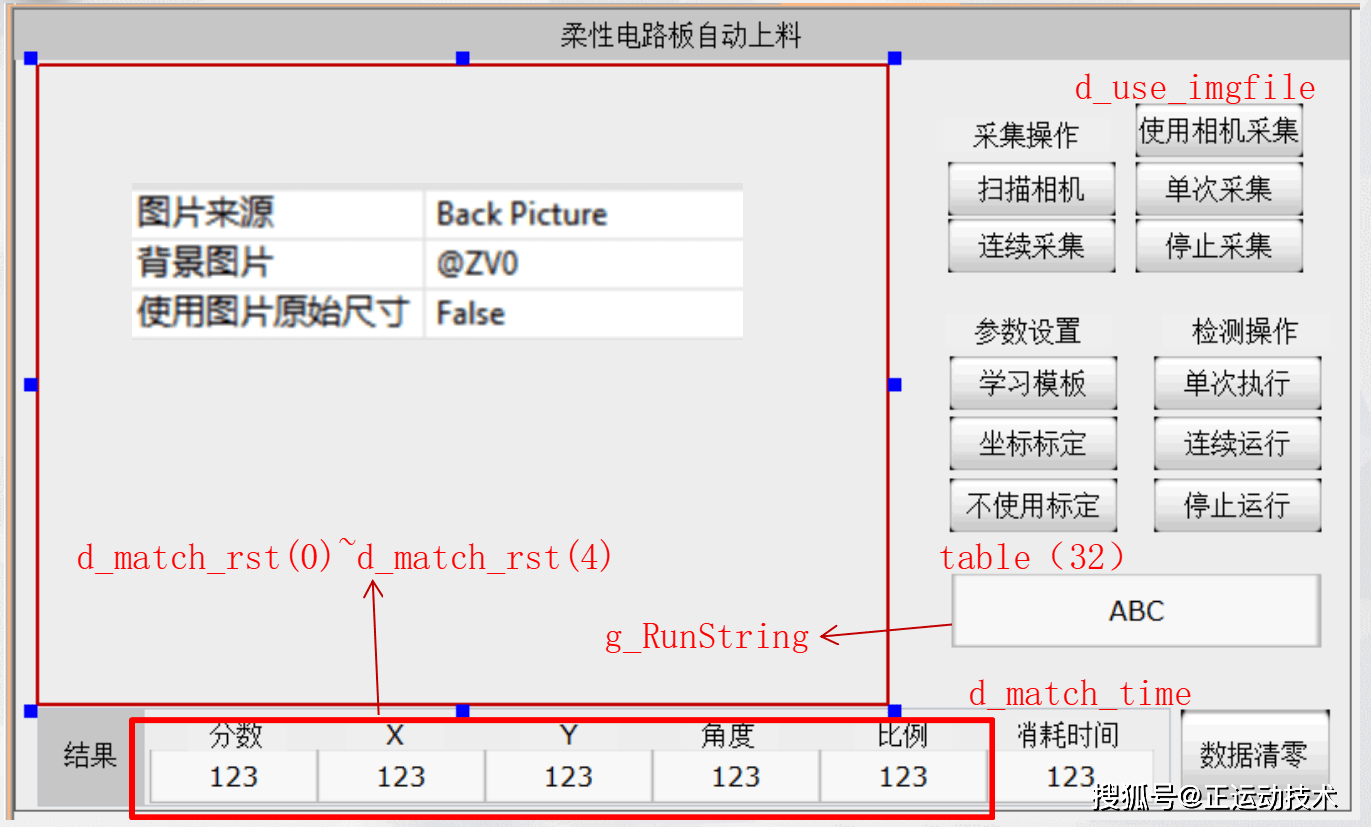
3.关联HMI界面控件变量。
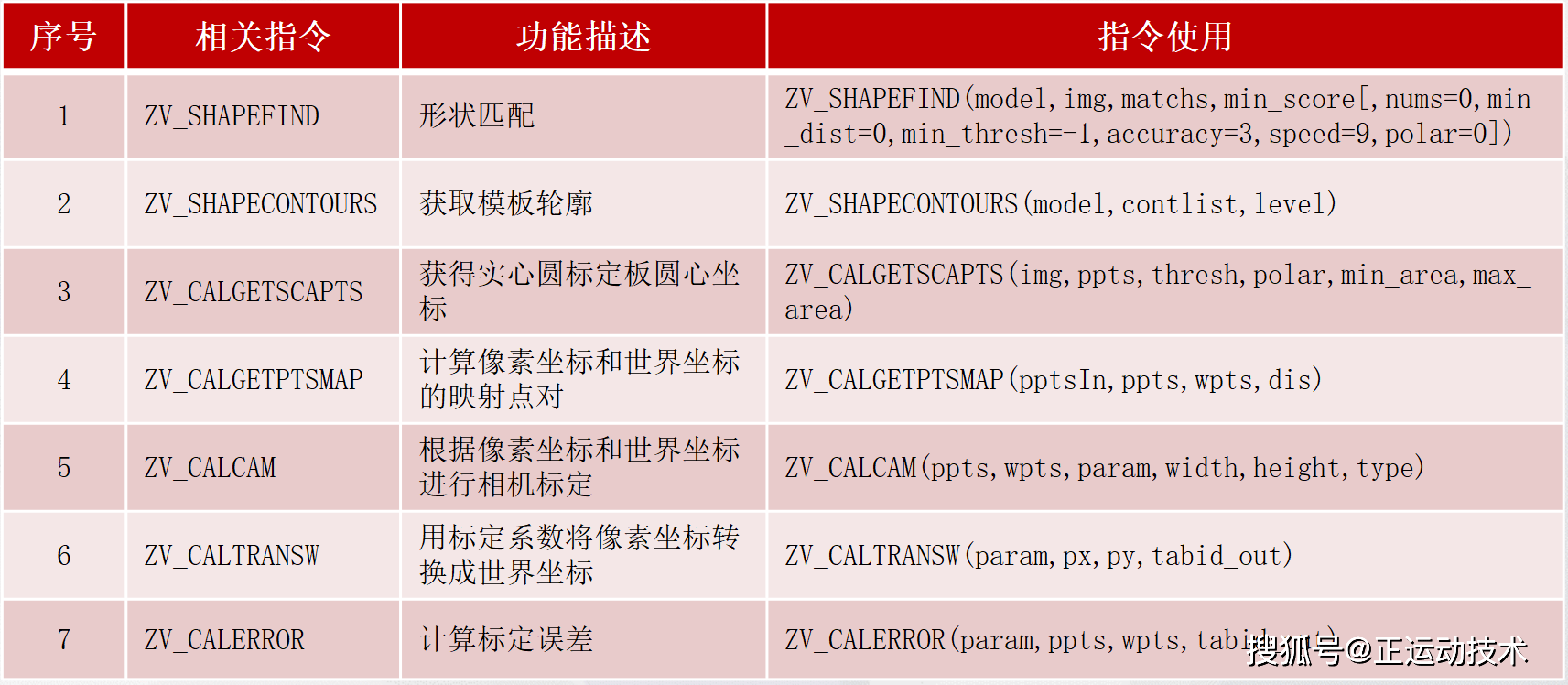
4. 本期课程代码主要实现的功能使用到的指令如下。
四、操作演示
(一)操作步骤
查看运行效果:将项目下载到仿真器中→使用本地图片→单次采集→点击学习模板(创建柔性电路板的形状模板)→点击坐标标定(进行mark点标定)→点击使用标定(查看当前柔性电路板的坐标信息)→点击连续运行,查看连续运行效果→结束。
(二)效果演示
本次,正运动技术机器视觉运动控制一体机应用例程| 柔性电路板自动上料解决方案 ,就分享到这里。
更多精彩内容请关注“ 正运动小助手 ”公众号,需要相关开发环境与例程代码,请咨询正运动技术销售工程师: 400-089-8936 。
本文由正运动技术原创,欢迎大家转载,共同学习,一起提高中国智能制造水平。文章版权归正运动技术所有,如有转载请注明文章来源。