


运动控制器PSO位置同步输出(三):高精度等间距二维三维PSO输出
供稿:深圳市正运动技术有限公司
- 关键词:PSO指令,ZMC460N控制器,运动控制器
- 作者:正运动
- 摘要:PSO功能主要通过“HW_PSWITCH2”硬件位置比较输出指令和“HW_TIMER”硬件定时指令实现,下面来讲解一下这两个指令的详细用法。
上节课程我们讲述了多种PSO模式原理和使用方法,本节课程我们主要讲解一下如何使用PSO功能实现高精度等间距输出。
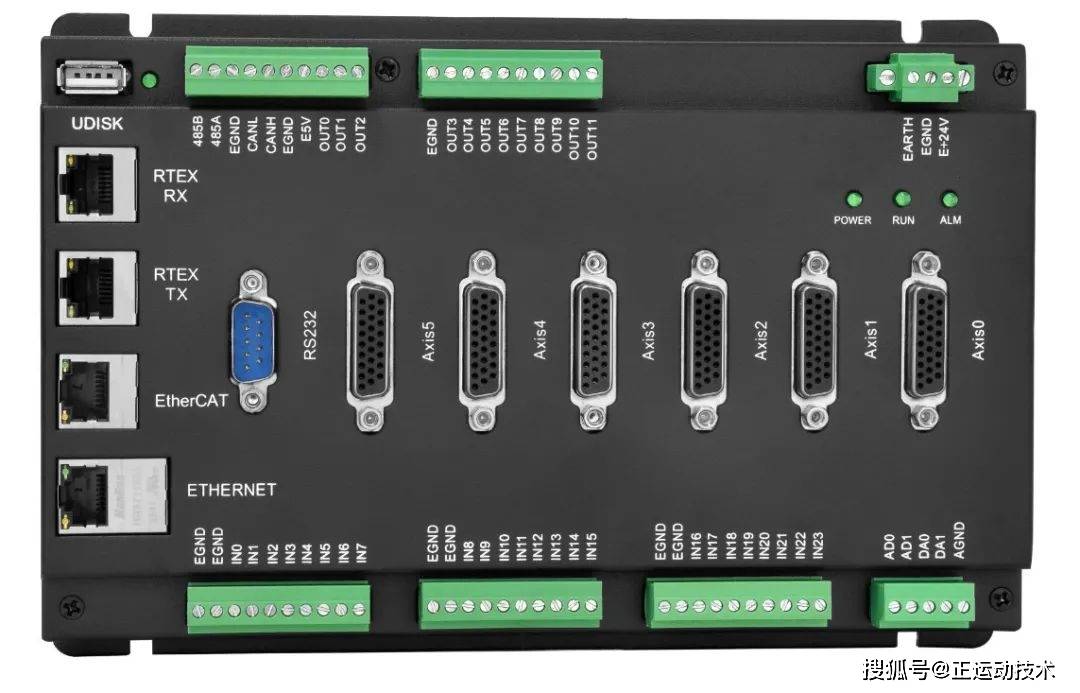 ZMC460N双总线控制器
ZMC460N双总线控制器
一、硬件说明
硬件选型的首要要求是支持PSO功能,再分析PSO的应用场合和轴数等选择具体的型号。本例以ZMC460N双总线运动控制器为例展开介绍。
PSO功能用于控制激光或点胶阀的高速开/关,直线插补和平面圆弧插补功能用于完成加工轨迹,连续插补功能用于让多段插补的速度连续,提高加工的效率。
ZMC460N双总线控制器
ZMC460N双总线控制器是正运动技术推出的新一代网络60轴运动控制器(支持EtherCAT总线轴+RTEX总线轴+脉冲轴混合使用),自带六个脉冲轴接口(包含差分脉冲输出和差分编码器输入),通用输出口支持配置为单端脉冲输出,通用输入口支持配置成单端编码器输入。脉冲输出频率最大可达10MHZ,EtherCAT总线的通讯周期最快可达250微秒。
支持12路PSO输出,输出口独立,支持12路同时输出,每个系统周期可比较输出多次,应用场景更为丰富。
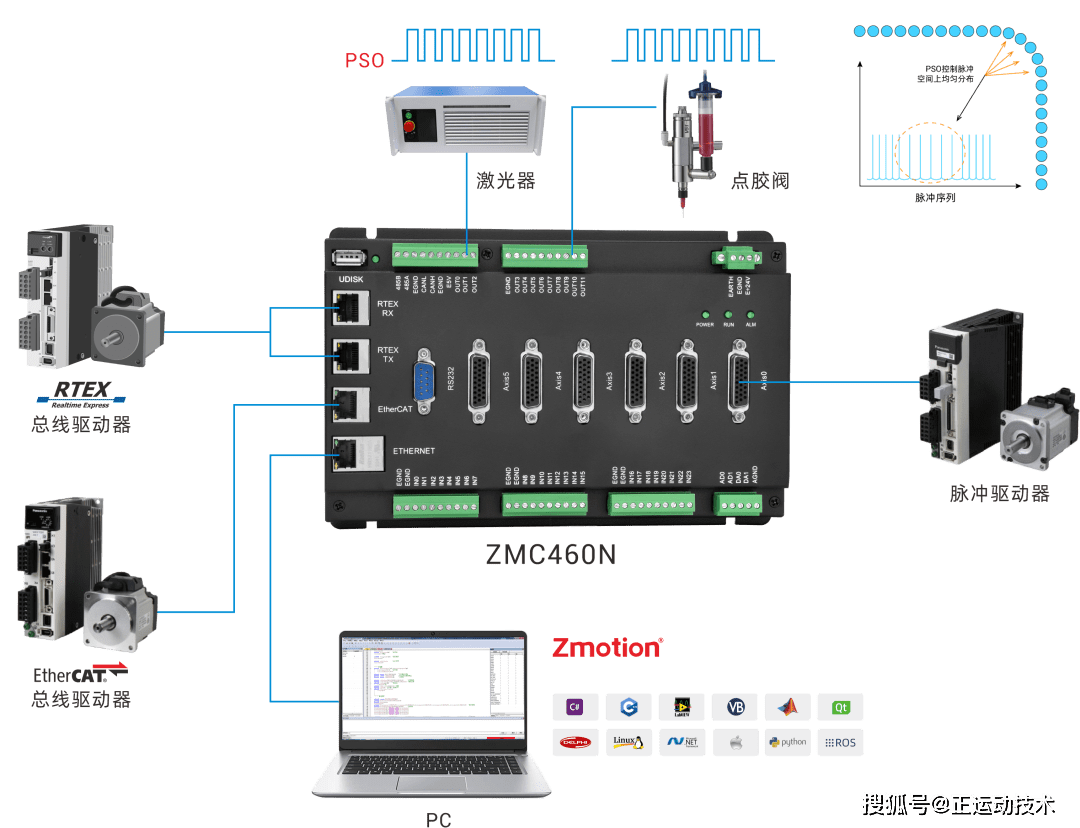 ZMC460N双总线控制器架构图
ZMC460N双总线控制器架构图
PSO功能主要通过“HW_PSWITCH2”硬件位置比较输出指令和“HW_TIMER”硬件定时指令实现,下面来讲解一下这两个指令的详细用法。
二、指令说明
1.HW_PSWITCH2
案例将会用到HW_PSWITCH2以下几个模式,指令语法说明如下:
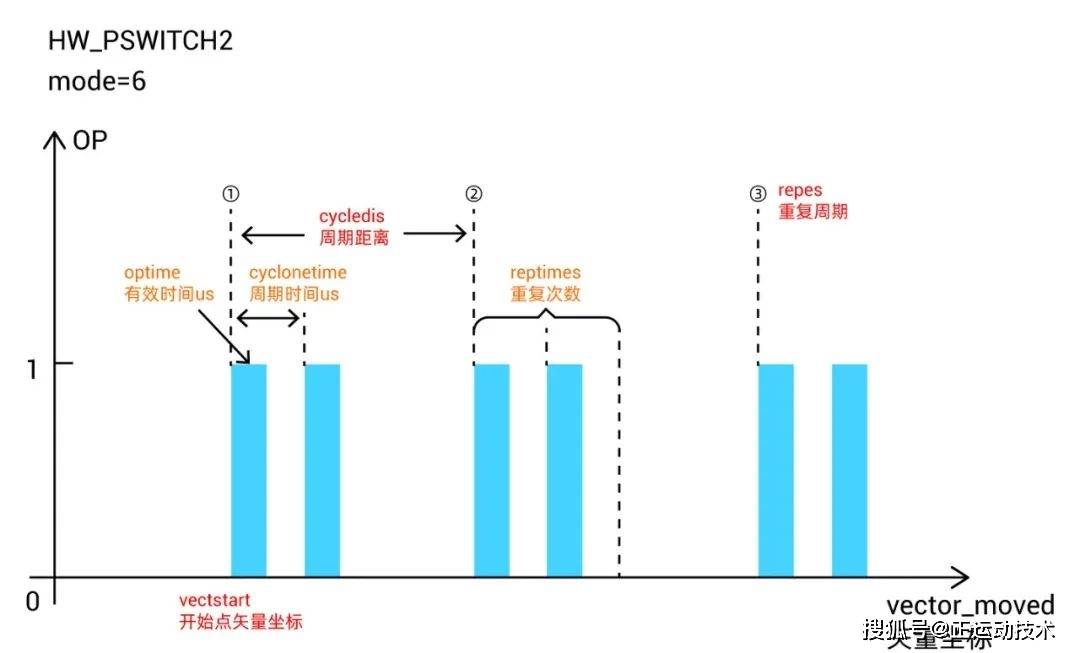
(1)Mode=6:矢量比较方式,周期模式,与HW_TIMER一起使用
HW_PSWITCH2(6,opnum,opstate,vectstart,repes,cycledis)
mode:6-启动比较器
opnum:对应的输出口
opstate:第一个比较点的输出状态
vectstart:比较点VECTOR_MOVED当前运动距离
repes:重复周期,一个周期只比较一次
cycledis:周期距离,每隔这个距离输出一次
⊙ 说明: 此模式无需TABLE,坐标均参考矢量坐标,从vectstart的位置开始比较,每隔cycledis距离触发一次比较,重复比较的周期为repes,每次触发比较信号后,保持信号的脉冲宽度由HW_TIMER指令设置。
HW_TIMER可以控制到达一个触发点控制OP反转多次,HW_TIMER周期走完等待下一周期的触发。
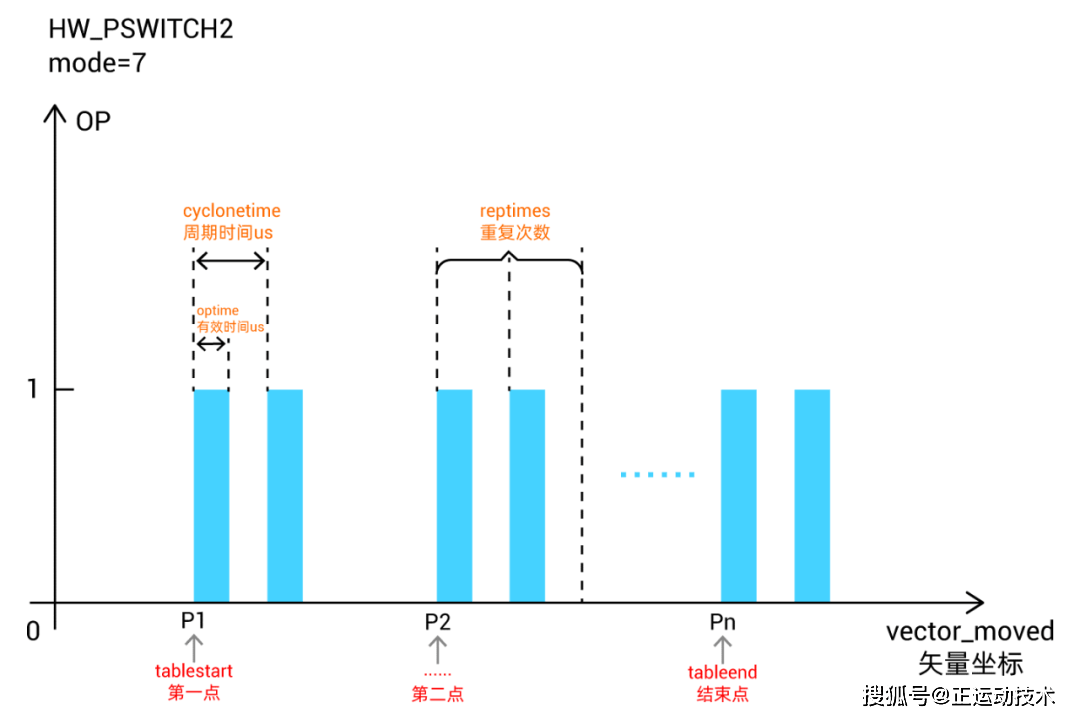
(2)Mode=7:矢量比较方式,采用TABLE,与HW_TIMER一起使用
HW_PSWITCH2(7,opnum,opstate,tablestart,tableend [,optimeus,optimes,cyctimeus])
mode:7-启动比较器,opstate不翻转,方便与HW_TIMER配合使用
opnum:对应的输出口
opstate:第一个比较点的输出状态
tablestart:第一个比较点VECTOR_MOVED坐标所在TABLE编号
tableend:最后一 个比较点VECTOR_MOVED坐标所在TABLE编号
[以下参数和HW_TIMER二选一,HW_TIMER单独写可以动态调整参数]
optimeus:动态调整HW_TIMER的有效时间
optimes:动态调整HW_TIMER的触发脉冲数,0-不输出
cyctimeus:动态调整HW_TIMER的脉冲周期时间
⊙ 说明: 比较点写在TABLE中,坐标均参考矢量坐标,每到达一个TABLE比较矢量位置触发OP,此时OP的脉冲宽度和每次触发的比较次数由HW_TIMER控制;到达下一个TABLE位置,OP再次触发。
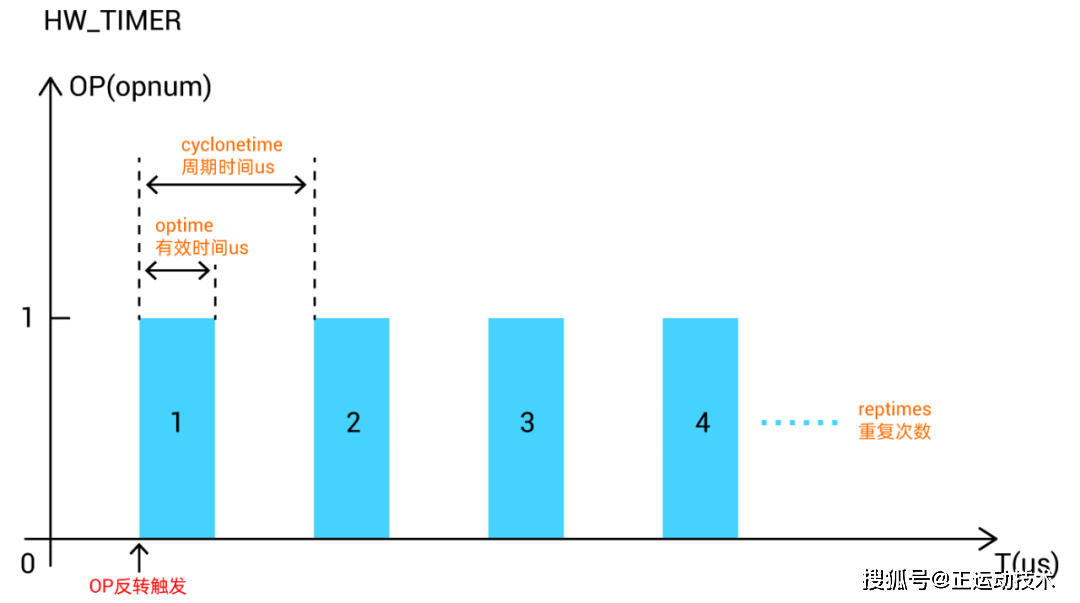
2.HW_TIMER
硬件定时器,用于硬件比较输出后一段时间后还原电平。HW_TIMER只有1个,每次调用会强制停止之前的调用。
不使用或比较完成时使用HW_TIMER(0)关闭。
HW_TIMER(mode,cyclonetime,optime,reptimes,opstate,opnum )
mode:0停止,2-启动
cyclonetime:周期时间,us单位
optime:有效时间,us单位
reptimes:重复次数,启动模式,reptimes =0时,软关闭HW_TIMER,原来的脉冲没有完成的,会继续输出完成
opstate:输出缺省状态,输出口变为非此状态后开始计时
opnum:输出口编号,必须能硬件比较输出的口
⊙ 说明: 参数设置可参考下方示意图,此指令的效果是固定时间周期输出,设置每个周期的有效输出的时间和重复输出的次数。
⊙使用HW_TIMER硬件定时无法仿真,只能在控制器平台运行。
三、二维等间距PSO输出
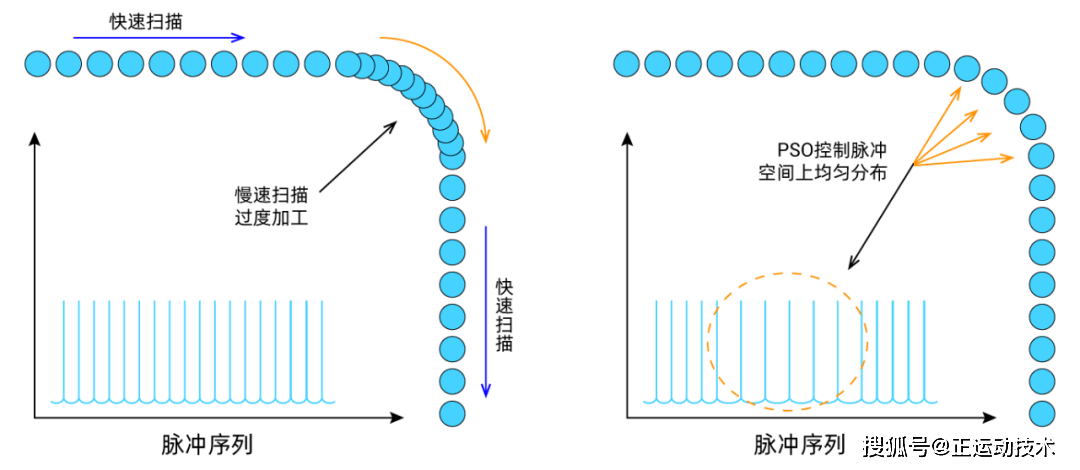
等距比较输出模式,不管运动速度和运动轨迹如何变化,始终固定距离输出脉冲,使得输出在空间上分布是均匀的,示意图如下。
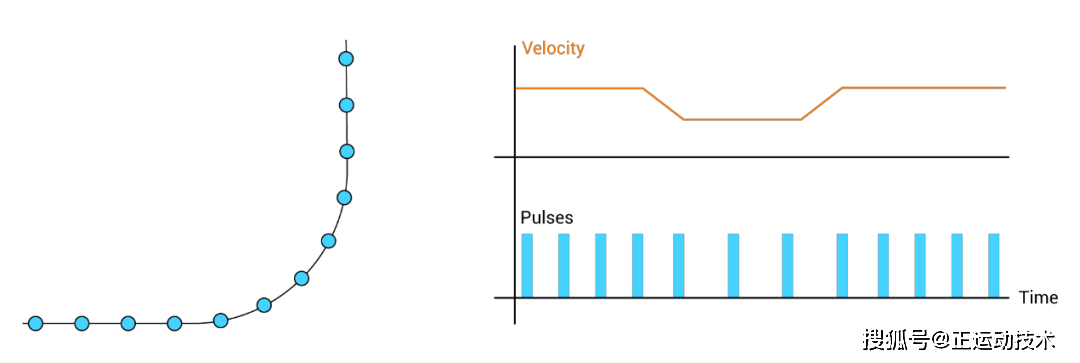
上节描述的模式中,有几种模式都能实现XY平面的等距输出,例如现有一段上左图所示的轨迹,采用直线+圆弧+直线组成,每间隔10个距离比较输出一次,一共比较12次,等间距输出的方法参见下方例程的说明。
例程: 采用mode=6,矢量比较模式,结合HW_TIMER硬件定时,采用两轴的合成矢量位置作为比较的参考坐标位置,实现上方示意图的效果,使用方便,无需计算位置坐标,精度高。
RAPIDSTOP(2)
WAIT IDLE(0)
WAIT IDLE(1)
'基础轴参数设置
BASE(0,1) '选择XY轴
'ATYPE=4,4 '1-脉冲轴类型,比较DPOS;4-带编码器反馈轴类型,比较编码器的反馈位置MPOS
UNITS=100,100
SPEED=100,100
ACCEL=1000,1000
DECEL=1000,1000
MERGE=ON,ON
SRAMP=50,50 's曲线速度平滑
OP(0,OFF)
'将当前位置设置为0,0
DPOS=0,0
MPOS=0,0
DIM WidthTime,Interval,StartPos,EndPos
WidthTime = 20000 '脉冲宽度20000us
Interval = 10 '脉冲间隔
StartPos = 10 '触发起始位置
EndPos = 130 '结束位置
FORCE_SPEED=60 'SP速度
MOVEABS(0) '运动到0位
WAIT IDLE
VECTOR_MOVED = 0 '插补矢量距离清0
DIM iTime
iTime =ABS(EndPos - StartPos) \ Interval '计算比较次数
TRACE StartPos,iTime,Interval,WidthTime
HW_PSWITCH2(2) '清空HW比较缓冲区
HW_PSWITCH2(6,0,ON,StartPos,iTime,Interval) '从StrartPos触发比较间隔Interval比较iTime次
HW_TIMER(2,WidthTime+100,WidthTime,1,OFF,0) '输出触发变成ON后,打开WidthTime us后关闭输出
DELAY(10)
TRIGGER '启动示波器
MOVEABS(50,0) '开始运动
MOVECIRCABSSP(75,25,50,25,0)
MOVEABS(75,75)
WAIT IDLE '等待运动停止
HW_PSWITCH2(2) '清空HW比较缓冲区
END
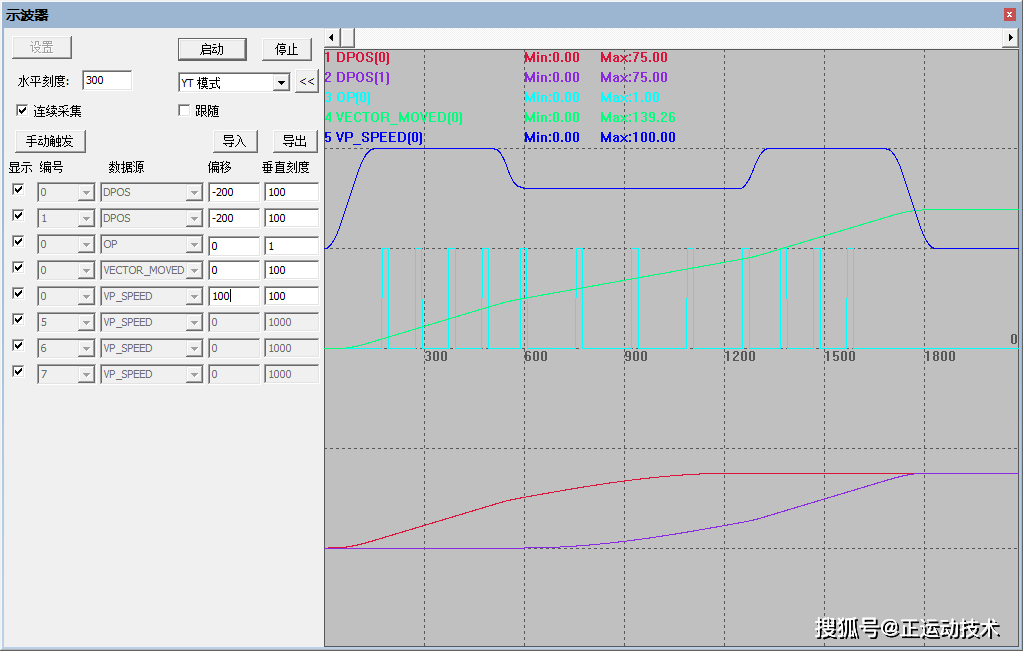
示波器采样波形如下:采样5个通道的波形,依次为轴0的目标位置,轴1的目标位置,输出口0,轴0和轴1插补的矢量合成位置,轴0和轴1插补的运行速度。
每间隔10个单位距离比较一次,一共比较12次,由HW_TIMER可精准控制输出脉冲的宽度,输出频率更快,整体精度更高。
XYZ模式下的比较输出波形:
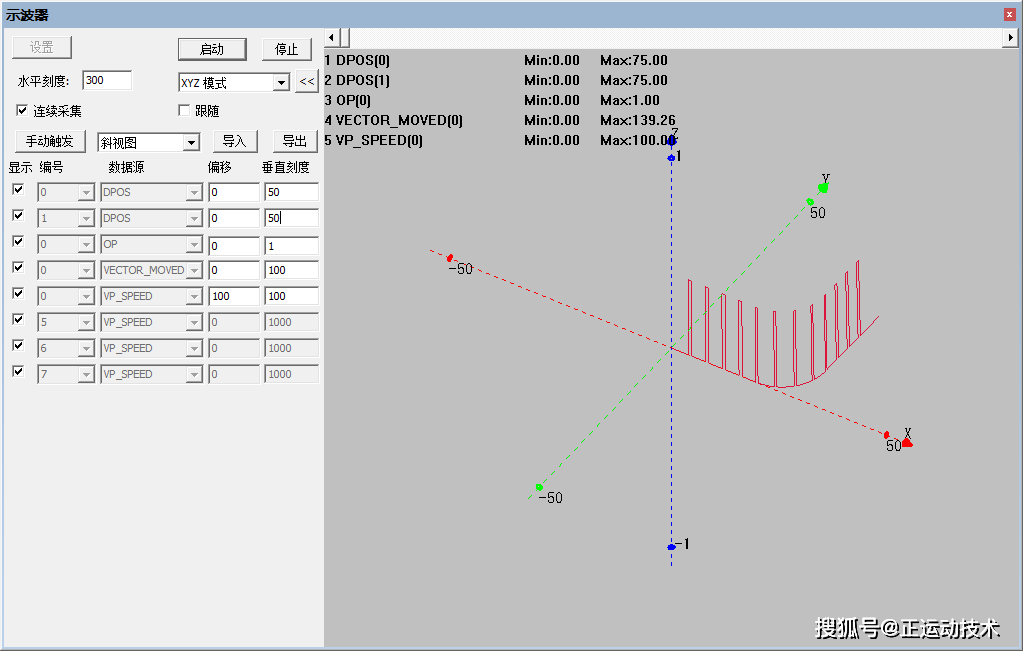
综上所述,等距比较场合,使用模式6较为方便,只需要得出比较的距离和OP输出的时间即可,模式6可用于单轴和多轴插补场合的比较。模式5和模式7也能实现上述功能。
四、三维等间距PSO输出
1.三维等间距PSO输出示例
例程:采用模式7,模式6是按指令设置的触发距离周期输出,模式7的输出位置由TABLE的数据点控制,输出位置更灵活,可实现上例等距输出,也可实现灵活间隔的输出。
RAPIDSTOP(2)
WAIT IDLE(0)
WAIT IDLE(1)
WAIT IDLE(2)
'基础轴参数设置
BASE(0,1,2) '选择XY轴
'ATYPE=4,4,4 '1-脉冲轴类型,比较DPOS;4-带编码器反馈轴类型,比较编码器的反馈位置MPOS
UNITS=100,100,100
SPEED=100,100,100
ACCEL=1000,1000,1000
DECEL=1000,1000,1000
MERGE=ON,ON
SRAMP=50,50,50 's曲线速度平滑
OP(0,OFF)
'将当前位置设置为0,0
DPOS=0,0,0
MPOS=0,0,0
FORCE_SPEED=60 'SP速度
MOVEABS(0,0,0) '运动到0位
WAIT IDLE
VECTOR_MOVED = 0 '插补矢量距离清0
DIM WidthTime,T_Startnum,Pointnum
WidthTime = 10000 '脉冲宽度10000us
T_Startnum = 0 '比较点起始table编号
Pointnum = 8 '比较点个数
TABLE(T_Startnum,10,30,50,70,90,110,130,150) '比较点坐标设置,起始table位置T_Startnum,8个点
HW_PSWITCH2(2) '清空HW比较缓冲区
HW_PSWITCH2(7,0,ON,T_Startnum,T_Startnum+Pointnum-1) '模式7
HW_TIMER(2,WidthTime+100,WidthTime,1,OFF,0) '输出触发变成ON后,打开WidthTime us后关闭输出
DELAY(10)
TRIGGER '启动示波器
MOVEABS(100,80,90) '三轴直线插补
WAIT IDLE '等待运动停止
HW_PSWITCH2(2) '清空HW比较缓冲区
END
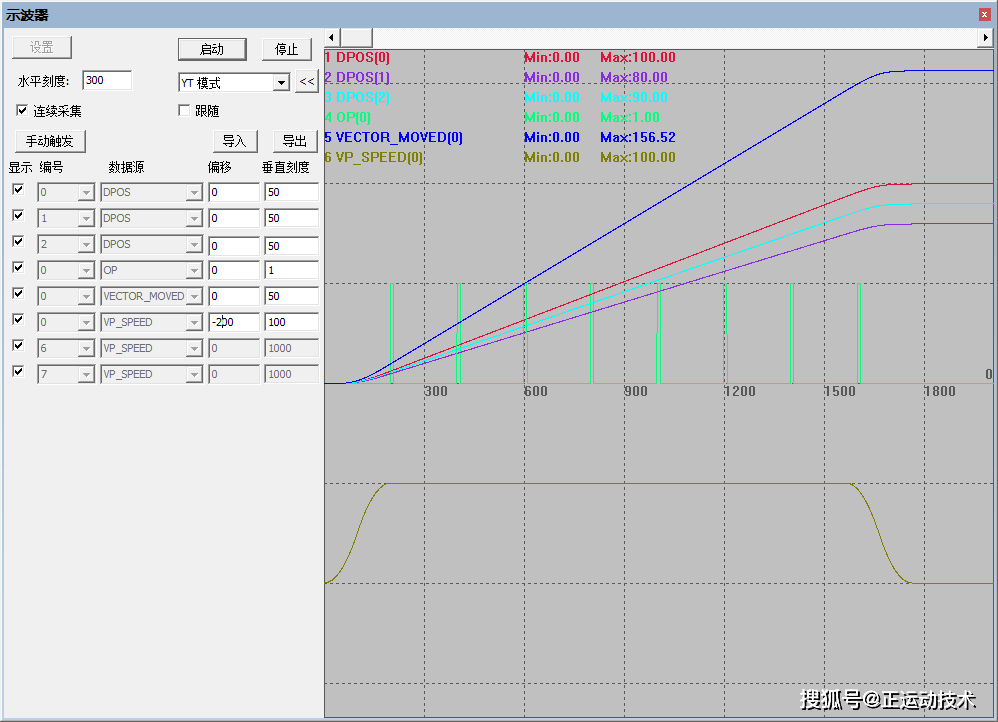
波器采样波形如下:采样6个通道的波形,依次为轴0的目标位置,轴1的目标位置,轴2的目标位置,输出口0,轴0轴1轴2插补的矢量合成位置,轴0轴1轴2插补的运行速度。
Table存储的比较点矢量位置为10,30,50,70,90,110,130,150,共8个点,每到一个点触发比较,由HW_TIMER可精准控制输出脉冲的宽度,输出频率更快,整体精度更高。
2.视频演示
更多精彩内容请关注“ 正运动小助手 ”公众号,需要相关开发环境与例程代码,请咨询正运动技术销售工程师:400-089-8936。<section data-source="bj.96weixin.com" style="margin: 20px 0px 15px; padding: 0px; outline: 0px; max-width: 100%; color: rgb(34, 34, 34); font-size: 17px; letter-spacing: 0.544px; background-color: rgb(255, 255, 255); font-family: -apple-system-font, BlinkMacSystemFont, " helvetica="" neue",="" "pingfang="" sc",="" "hiragino="" sans="" gb",="" "microsoft="" yahei="" ui",="" yahei",="" arial,="" sans-serif;="" min-height:="" 1em;="" text-indent:="" 2em;="" line-height:="" 1.75em;="" box-sizing:="" border-box="" !important;="" overflow-wrap:="" break-word="" !important;"=""> 本文由正运动技术原创,欢迎大家转载,共同学习,一起提高中国智能制造水平。文章版权归正运动技术所有,如有转载请注明文章来源。 正运动技术专注于运动控制技术研究和通用运动控制软硬件产品的研发,是国家级高新技术企业。正运动技术汇集了来自华为、中兴等公司的优秀人才,在坚持自主创新的同时,积极联合各大高校协同运动控制基础技术的研究,是国内工控领域发展最快的企业之一,也是国内少有、完整掌握运动控制核心技术和实时工控软件平台技术的企业。主要业务有:运动控制卡_运动控制器_EtherCAT运动控制卡_EtherCAT控制器_运动控制系统_视觉控制器__运动控制PLC_运动控制_机器人控制器_视觉定位等等。