


众为兴永磁同步电机系统在给料机系统中的应用
- 关键词:众为兴,低压伺服电机,驱动器系统,QS208020M驱动器,ACL06040B-2B,伺服电机,失重式,给料机系统
- 作者:众为兴
- 摘要:众为兴开发了一套新的低压伺服电机驱动器系统。该系统由QS208020M驱动器和ACL06040B-2B伺服电机来组成,可以应用于失重式给料机系统中。
概述
失重式给料机由料斗、喂料器(单、双轴螺旋喂料器)、称重系统和调节器组成,在操作中,料斗、物料和喂料器共同连续地进行称重。随着物料送出后,测量真实的失重速率,并将它与所需要的失重速率(设定值)加以比较。失重式给料机(失重给料机)通过调解喂料器速率来自动修正偏离设定点的偏值。从而可以均匀准确地连续喂送物料。
目前给料机给料器主要采用交流伺服电机。但是随着产品的升级,客户要求伺服电机具有高速、高平稳性、高过载能力、低成本、小体积等特点。为了适应这种市场需求,我们公司开发了一套新的低压伺服电机驱动器系统。该系统由QS208020M驱动器和ACL06040B-2B伺服电机来组成,可以应用于失重式给料机系统中。
1.伺服电机ACL06040B-2B
给料机要求螺杆轴的电机具有较宽的转速范围,运行平稳。计算表明,在一定降额的情况下,400W就具有足够的余量。而且给料机系统中大部分具有60V开关电源,所以我们选择了60V、400W、3000rpm作为永磁同步电机的额定参数。电机的定子采用4对极绕组,永磁体采用高性能的稀土永磁材料(Nd-FeB)。反馈元件采用2500线的增量式光电编码器,电机的分辨率为10000脉冲/每圈.
电机参数见下表1
| 电机型号 | ACL06040B-2B | 线电阻(Ω) | 0.3327±10% |
| 额定功率(W) | 400 | 线电感(mH) | 1.41±10% |
| 额定电压(V) | 60 | 转子惯量(Kg.m2*10-4) | 0.3221±10% |
| 额定电流(A) | 8.4±10% | 力矩系数(NM/A) | 0.1501±10% |
| 峰值电流 | 16.1±10% | 反电动势系数(V/KRPM) | 9.08±10% |
| 额定转速(RPM) | 3000 | 额定扭矩(NM) | 1.27 |
表1:ACL06040B-2B电机参数表
实际测量电机的特性曲线入下图所示。测试方法是先设定电机的转速为3000rpm,然后负载从0慢慢增加到0.64NM,测试电机的实际转速。

图1:ACL06040B-2B电机运频特性
测试数据表明,在整个加载过程中,电机的转速稳定在3000±1rpm,因此其相对转速变化率
其中
n0 =空载时转速
nl=满负载时转速。
从测试数据来看电机在整个转速范围内运行非常平稳。通过对比测试发现,其平稳性并不国外著名品牌的差,而且价格具有较大的优势。
2.交流伺服驱动器QS208020M
伺服的控制要求和步进电机或感应电机有较大的区别,它要求电机具有控制系统具有响应快、精度高、高转速、转矩脉动小等特点。目前FOC算法是较为成熟的算法之一,本驱动器采用基于TMS320F2801和FOC算法技术进行对电机动态解耦控制。
2.1磁场定向控制原理
伺服驱动器的控制原理图如下:
1.转子磁极位置检测和速度计算模块;
2.位置环、速度环、电流环控制器;
3.3S/2S,2S/2R,2R/2S坐标变换模块;
4.SVPWM模块;
5.三相逆变模块。
QS208020M伺服驱动器通过电流采样电阻或者霍尔电流传感器检测电机的相电流ia、ib,(其中ic可以由方程 ia+ib+ic=0求得,因此实际应用中只需要采集两相电流就足够了)。所采样到的相电流经过A/D转换器转化成数字量并送进DSP做处理。
通过Clarke变换和Park变换将电流ia,ib,ic变换成旋转坐标系中的直流分量id、iq。id 、iq作为电流负反馈送到电流调节器中进行处理。
给定位置θref与位置反馈量θm的偏差经过位置调节器计算,其输出作为参考转速nref,nref与转速反馈量n的偏差经过速度调节器、其输出作为用于转矩控制的q轴电流参考分量iqref。以转速反馈量n作为输入的函数发生器,根据控制策略制定的"n-Ψ"曲线给出了用于产生磁场的d轴电流参考分量idref。idref和iqref与电流反馈量iq,id的偏差经过电流调节器,分别输出Οdq旋转坐标系的相电压分量vqref和vdref。再经过Park逆变换转换成Οαβ直角坐标系的定子相电压矢量的分量varef和vbref。
编码器会反馈转子的磁极位置信号UVW,可以通过UVW信号来确定转子所在的扇区,就可以利用SVPWM模块,产生三相PWM斩波,从而可以采用类似直流电机的方法进行控制交流伺服电机。
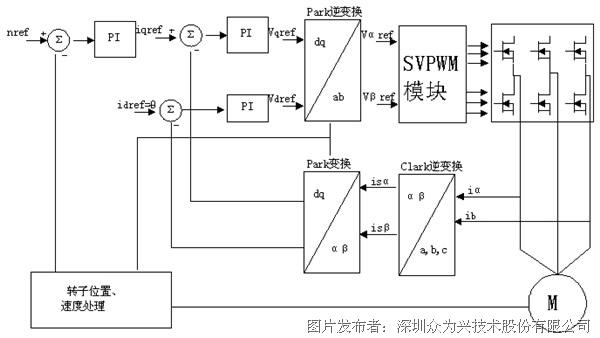
图2:QS2伺服驱动器工作原理(点击图片可放大查看原图)
QS2伺服驱动器。
本伺服驱动器采用了32位高性能的DSP芯片,采用先进的FOC技术。它具有高性能,高精度,体积小巧,使用方便等优点。通过在给料机系统上测试表明,电机从静止到加速到最高转速,仅需要约10毫秒的时间。故在给料机这种高精度、高响应性的场合,能很好地满足客户需求。
1.给料机系统分析。
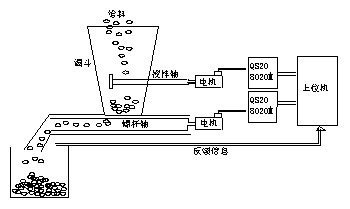
图3:给料机工作原理
给料机的结构如上图所示。颗粒通过漏斗往下进入螺杆轴。其中搅拌轴在工作时做搅拌用,可以增加颗粒物的流动性。颗粒从螺杆的螺纹间隙中,随着这螺杆是旋转不断向前推荐。假设螺杆旋转一圈,颗粒物前进的质量为Δm。因此螺杆轴输出的物料的质量M=Δm*L,其中L是螺杆旋转的圈数。由上述可知,控制电机所旋转的圈数,就能控制颗粒物给料的质量。
本应用案例中,采用的是QS208020M+ACL06040B-2B电机,输入方式采用模拟量输入控制转速,其具有响应快,控制精度高的特点,能很好的应用在给料机系统当中。
2.结论
给料机的螺杆轴对伺服性能要求体现在响应性和平稳性和定位精度。本数字
伺服系统有响应快,转矩脉动小,精度高的特点能很好的应用在给料系统中。
目前,QS208020M驱动器已经ACL06040B-2B电机已经大量的应用在给料机行业中。下图为某公司的给料机系统,该系统就在行业处于领先地位,其用的就是本公司的产品。
