


机器人安全应用系列:运动限制
- 关键词:皮尔磁,机器人,安全
- 摘要:众所周知,工业机器人系统特别是当其在处理大型工件时,可能具有一个大范围的运动空间。
众所周知,工业机器人系统特别是当其在处理大型工件时,可能具有一个大范围的运动空间。
为了适应机器人系统的最大运动范围,系统周围的机械式防护装置便需要扩大保护范围,用以保证机器人执行任务时不会与周边防护产生干涉。
显然,以这样的理念设计的防护结构可能造成资源的极度浪费。如果能应用合理的、满足操作需求的运动限制,我们不仅能够有效地提高利用率,同时也为操作人员增加了一道安全的屏障。

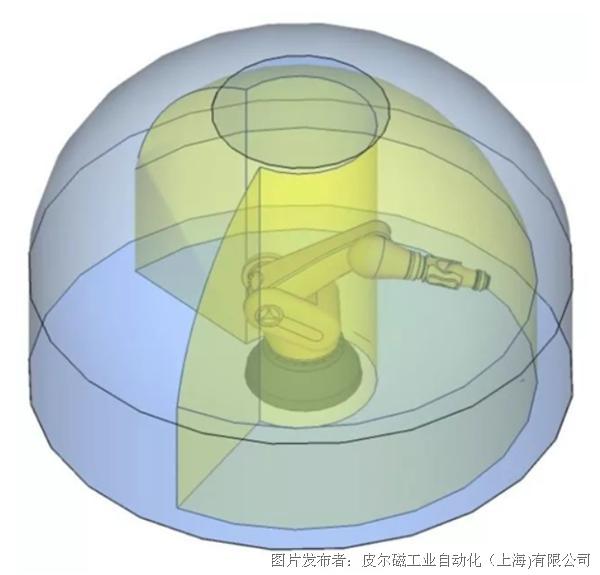
工业机器人的运动范围很大
限定空间的建立
机器人系统的限定空间,主要基于周边的机械式防护来建立。
在考虑机器人的位置、布局并提前评估防护空间内部的危险后再进行机械式防护的空间设计,是比较建议的流程。设计环节中,除了要考虑机器人自身外,还要综合考虑末端执行器、夹具和工件的运动等因素。
限定的空间尽量与操作空间进行匹配,用以最大化提高利用率。
建立机器人的限定空间
限制机器人的运动主要分为两类:机械式和非机械式限位。
其一:机械硬限位
机械式的硬限位用以在物理上约束机器人不超出指定的界限。由于这种类型的限位会与机器人产生物理接触,因此需要特别注意:使用这样的限位方式,应当保证在碰撞后限位部分不会产生物理形变。

高强度的围栏作为硬限位
其二:轴及空间的安全软限位
这是一种非机械式的软限位,由内置的软件来确定机器人的运动极限。轴限位能够约束机器人的轨迹;空间限位可以确定专有区域的几何形状。
由于这种类型的限位是由软件进行设定,因此修改参数的权限也应当受到密码的严格保护。

软件中的安全边界设定
其三:结合传感器的外部限位装置
另外一种非机械式的限位是通过使用外部的传感器,例如安全的接近开关、非接触式编码开关,甚至安全光幕所构成的虚拟屏障,在这些外部传感器接收到超限的逻辑响应时,主动激活机器人的安全停止信号。
以上两种非机械式的限位装置,由于原理上通过逻辑系统进行控制,因此需要额外考虑机器人的停止响应距离。
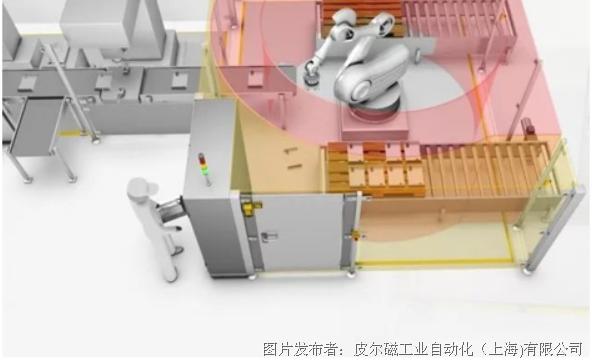
使用传感器设置虚拟屏障
作为机器人安全应用专家,皮尔磁提供包含EN ISO 10218和RIA15.06标准在内的机器人安全课程。
通过该课程,参加者将学习和理解机器人系统安全要求的基本知识,同时了解如何在兼顾较高的可用性和生产效率的同时获得安全。
课程中还会特别针对使用机器人系统时如何进行风险评估进行深入的讲解。