


干货 | 浅析伺服系统应用中的编码器调试问题
- 关键词:雷赛,交流伺服,编码器
- 摘要:雷赛交流伺服历经15年的不断进步,产品性能和稳定性国内持续领先,成为市场上广受好评的伺服品牌。随着伺服应用的扩大,在不同应用场合中,客户希望伺服驱动器能与不同的伺服电机匹配。
雷赛交流伺服历经15年的不断进步,产品性能和稳定性国内持续领先,成为市场上广受好评的伺服品牌。随着伺服应用的扩大,在不同应用场合中,客户希望伺服驱动器能与不同的伺服电机匹配。而雷赛LD5系列伺服驱动器通用性就非常强大,不仅可支持雷赛品牌伺服电机,同时支持直流无刷、空心杯、其他品牌交流伺服电机等多种电机形式。
这些电机中若具备电子铭牌功能,在应用中就可以直接使用,不需要调整编码器,例如雷赛交流伺服电机具有电子铭牌功能,能自动识别电机型号,参数并对应匹配参数就能发挥伺服优异性能。若不具备电子铭牌功能的电机,则需要调整编码器和电角度。那么,这类伺服电机如何选择及调整编码器以适配高低压交流伺服驱动呢?
下面我们以雷赛LD5系列伺服为例,通过编码器原理、霍尔应用原理、调整步骤三个方面进行解读:
一、编码器原理
编码器的种类有很多种,输出的信号形式也有很多种,目前主要使用的为光电编码器,输出信号形式为脉冲方式,其原理如下图1-1

图1-1
光电码盘安装在电机轴上,其上有环形通、暗的刻线。通过LED发射光源,多组光耦器件矩阵排列提升信号稳定性,并通过接受光源的强弱,内部进行比较输出A、B两路信号。A、B信号相差90度相位差。另外每转输出一个Z相脉冲以代表零位参考位。
由于A、B两相相差90度,可通过比较A相在前还是B相在前,以判别编码器的正转与反转。
为增加编码器信号长线传输的稳定性,A、B、Z信号输出时经差分输出以增加信号稳定性。
光电编码器的霍尔信号U、V、W其产生原理与A、B信号基本一致。无刷或低压伺服也有通过磁环及霍尔元件来产生霍尔信号。
二、伺服电机中霍尔应用原理
众所周知伺服电机相比其他电机具有很高的效率,其主要原因是伺服电机采用了矢量控制的原理。简单来说,伺服电机主要由旋转的永磁体(转子)和三组均匀分布的线圈(定子)组成,线圈包围着定子被固定在外部。电流流经线圈产生磁场,三组磁场相互叠加形成一个矢量磁场。通过分别控制三组线圈上的电流大小,我们可以使定子产生任意方向和大小的磁场。
同时,通过定子和转子磁场之间的相互吸引和排斥,力矩便可自由地得到控制。对于转子旋转的任意角度,定子都存在着一个最优化的磁场方向,能产生最大的力矩。很显然如果定子产生的磁场方向正交于转子的磁场方向,这个位置就是产生最大力矩的位置。
固定线圈的空间电流矢量具有一个固定的磁场方向,这完全由通过线圈的磁通大小和流经线圈的电流相互作用决定的。这样我们就可以用空间电流矢量来表征定子的磁场,这个空间电流矢量也就是三组线圈所产生的电流矢量的空间叠加。这个就是伺服矢量控制的基本原理。
1、 交流伺服电机的霍尔信号应用原理
交流伺服驱动起得到运转指令后,先根据电机霍尔U、V、W反馈的信号判断转子初步位置, 给出初始电流使定子形成一个与在该区间转子磁场垂直的磁场以驱动转子运转,当转子带动编码器运转使之输出第一个霍尔上升下降沿(U、V、W中任一个发生高低电平变化)时,驱动器立即根据该转子位置变换电流使定子形成与转子磁场垂直的磁场,此后便根据A、B信号判断转子的位置输出电流,确保定子的磁场始终与转子磁场垂直。为减少A、B信号的累计误差,每次遇到Z信号时便对A、B信号进行校正,以减少误差累计。
2、 运行演示(为方便理解,用一对极电机作图)
第一:判断转子位置

图1-2
如图1-2,编码器读数头获得的霍尔U、V、W信号将转子位置划分为6个区域,霍尔信号如下表

如图1-3所示,转子位于0-60°位置,则定子给出一与30°位置垂直的磁场使之旋转,如下图:
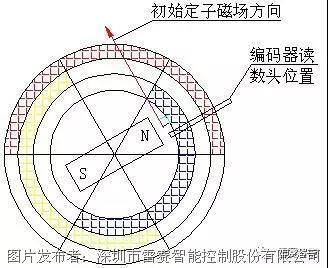
图1-3
此磁场方向初始一直保持不变,直至遇到第一个霍尔上升下降沿,便进行改变,如图1-4:

图1-4
从此以后便根据A、B信号判断转子位置,使定子磁场一直保持与转子磁场垂直。
三、调试步骤
1、 定义电机绕组U、V、W
电机绕组U、V、W反电动势需满足U超前V超前W。用示波器测量电机三相绕组的反电动势波形,得到如下波形图1-5:

图1-5
则可定义黄色波形所对应绕组为U,蓝色波形所对应绕组为V,红色波形所对应绕组为W。
2、检测编码器定义旋转正方向是否与电机旋转正方向一致。
这一项很多朋友都很容易忽略,总是直接按编码器的定义直接安装驱动器的信号要求来直接接线,经常导致有的信号编码器可以,换一种编码器又不行。产生这个问题的原因主要是驱动器与编码器不是同一家厂家生产的,所以其定义的旋转正方向不一致,就目前我所调试的编码器来看,安华高、多摩川定义的旋转方向与雷赛伺服定义一致,而内密控、丹纳赫定义的旋转方向相反。
所以对一个新的编码器,一、通过资料判断其定义的旋转方向,二、通过测试来确定其旋转方向,其方法如下:
1、按雷赛定义的旋转方向(逆时针)运转电机带动编码器运转,测试其定义的A、B信号波形,如图
1-6:

图1-6
如测试发现为B信号超前A信号90°,则需将A信号定义为B信号,B信号定义为A信号。如果不将A、B信号重新定义,则编码器反馈的行程与所运转的行程相反,导致伺服电机“飞车”的产生。
2、按雷赛定义的旋转方向(逆时针)运转电机带动编码器运转,测试其定义的霍尔U、V、W信号波形,

现霍尔U、V、W信号为霍尔U超前霍尔V超前霍尔W,则为符合雷赛伺服定义标准。如发现霍尔U超前霍尔W超前霍尔V,则需将霍尔W定义为霍尔V,霍尔V定义为W,如不进行重新定义,则根据上文中阐述的霍尔信号应用原理,则会发生驱动器对转子位置出现判断错误的情况。
3、霍尔信号与反电动势相位关系
如图1-7与1-8对相位关系

图1-7与图1-8
零相序为:霍尔U对UV线间反电动势(探头正接U、负接V), 霍尔V对VW线间反电动势(探头正接V、负接W),霍尔W对WU线间反电动势(探头正接W、负接U),相位关系为霍尔信号的上升沿过零点对反电动势上升沿的过零点。
146相序为:霍尔U对U相反电动势(探头正接U、负接零线), 霍尔V对V相反电动势(探头正接V、负接零线),霍尔W对W相反电动势(探头正接W、负接零线),相位关系为霍尔信号的上升沿过零点对反电动势上升沿的过零点。
通过以上的调整,大家就可以利用雷赛高可靠性的伺服驱动器匹配各类型伺服电机以满足各类应用要求了。
如想获得更多资讯,敬请关注“雷赛智能”官方公众号
+关注“雷赛智能”官方微信
欢迎通过以下方式关注"雷赛智能"
方法一:查找公众号,搜索“雷赛智能”-关注
方法二:扫描二维码-关注
