


基于PMC6496运动控制器的机械手上下料系统
- 关键词:PMC6496,机械手,运动控制器,梯形图编程
- 作者:赵向前 左 力
- 摘要:PMC6496运动控制器全面支持IEC61131-3标准梯形图编程语言,不仅拥有强大的逻辑控制功能,不添加其它模块即可实现高精度的直线插补、圆弧插补、螺旋插补等轨迹控制。本文通过一个机械手上下料控制系统的案例,介绍采用PMC6496的梯形图程序进行多轴复杂轨迹控制的方法。
一 PMC6496的特点
PMC6496运动控制器是雷赛公司在独立式运动控制器的基础上,精心研发的一款具有PLC特点的高性能产品。由于其全面支持IEC61131-3标准梯形图编程语言,在逻辑控制上完全可以与中、小型PLC媲美。同时,其强大的运动控制功能更是传统中、小型PLC无法匹敌的。
1 .PMC6496的硬件性能
图1为PMC6496运动控制器的硬件结构图。
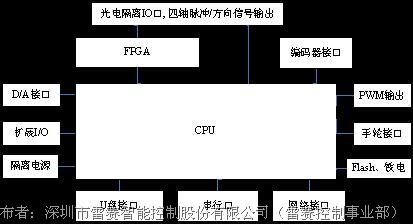
图1 PMC6496运动控制器硬件结构
PMC6496基于嵌入式处理器和FPGA的硬件结构,插补算法、脉冲信号的产生及加速和减速控制、I/O信号的检测处理,均由硬件和固件实现,确保了运动控制高速、高精度及系统稳定。该系列控制器可控制4个步进或伺服电机,具有最高5MHz脉冲频率、四轴直线插补、两轴圆弧插补、连续曲线插补、S形曲线速度控制等高级功能。通过简单的编程即可开发出稳定可靠的高性能连续轨迹运动控制系统。
除了4个电机控制端口外,还提供了丰富的I/O接口和通讯接口:光电隔离I/O接口、扩展I/O接口、D/A输出、PWM输出、编码器接口、手摇脉冲发生器接口。1个网络接口、2个串行口,可通过网口或串口与PC机通信;同时还可以通过串口连接其它设备,如:手持编程器、触摸屏、PLC等。可通过U盘接口用U盘方便地存储文件和参数。Flash用于存储用户程序、铁电存储器用于参数的掉电保存。PMC6496的主要技术指标详见表1。
表1 PMC6496控制器硬件性能
|
主要指标 |
描述 |
|
控制电机数 |
4轴 |
|
指令脉冲频率范围 |
1~5.0 M Hz |
|
指令脉冲数 |
-2,147,483,647 ~ +2,147,483,648(32位) |
|
脉冲输出模式 |
脉冲+方向、双脉冲 |
|
通用数字输入 |
32路(即输入继电器X:X0~X31),低通RC滤波 |
|
输入口可识别脉冲宽度 |
< 15 ms |
|
通用数字输出 |
24路(即输出继电器Y:Y0~Y23),低通RC滤波 |
|
PWM输出 |
2路:最高频率1M Hz,0~100%占空比可调 |
|
编码器接口 |
4路 |
|
编码器最高计数频率 |
4M Hz |
|
编码器计数范围 |
-2,147,483,647 ~ +2,147,483,648(32位) |
|
手摇脉冲发生器输入口 |
1路,输入脉冲最大频率1M Hz |
|
掉电保护 |
32K铁电存储器 |
|
网络接口 |
以太网,10M/100M |
|
串口通讯 |
2路,RS-232 |
|
U盘接口 |
USB1.1(12Mb/s) |
|
外部电源 |
24V dc,最大1100mA |
|
外壳尺寸 |
186´147´42mm |
|
电源 |
DC 24 V,最大1100 mA |
2. PMC6496的功能特性
PMC6496运动控制器运动控制性能优异的,工作稳定可靠,梯形图编辑环境友好。其主要特点如下:
简单易学:由于梯形图是自动化行业工程师最熟悉的编程语言,因此PMC6496的推出,大大降低了运动控制器的应用门槛,使用户更容易上手,快速开发自己的设备。
强大的运动控制功能:PMC6496可控制4轴步进电机或伺服电机进行4轴直线插补,任意2轴圆弧插补,多轴连续插补。可进行椭圆,螺旋等轨迹控制。并且,PMC6496配置了2048段指令缓冲,有效地保证了高速轨迹运动的连续性和平滑度。
友好的梯形图编辑环境:全面支持IEC61131-3标准梯形图编程语言,支持子程序,梯形图比较,看门狗,单步调试等功能,梯形图开发更加方便快捷。
HMI设备支持:PMC6496可与基于标准Modbus协议的人机界面进行通讯,包括:触摸屏、文本显示器、手持编程器等。用户只需在人机界面设计时,按相应的寄存器地址映射公式正确设置各种软元件的Modbus地址即可,而几乎不需要编写任何程序代码。
网络通讯:PMC6496是一款基于10/100M以太网的PLC,可以使得梯形图调试、下载等在线操作更加流畅。
二 机械手上下料的运动轨迹
某客户的生产线上需要使用机械手上下料,结构如图2所示。X轴执行水平左右运动,Y轴执行竖直上下运动,手爪由气缸控制执行抓取动作。它们的任务是将右侧工装上的工件依次抓取至左侧传送带上。X轴原点距离传送带上工件放置点为W,工装上第一个工件距离传送带上工件放置点为S,工装上每个工件之间的距离均为L。
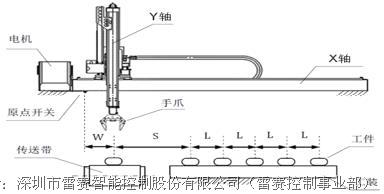
图2 机械手上下料系统组成
通常,大多数用户会将X、Y的运动轨迹确定为矩形,即Y轴上下运动完成后X轴再水平运动,然后Y轴再次上下运动,如此反复进行。但这样的方式会导致比较强烈的抖动,并且造成一定的时间浪费。
因此,可采用图4所示的运动轨迹,在2个拐弯处,X、Y轴进行一段半径为R的圆弧插补运动,这样可大大减弱抖动,且能节省时间。A点为起始点,抓取并放置第1个工件的路径为A→B→C→D→E→F→G→H→I→J→K,抓取并放置第2个工件的路径与第一个相同,只不过A→B和F→G的距离增加了长度L,第3个、第4个、第5个亦然。
PMC6496支持连续插补运动,在连续插补模式下,速度是连续的,各插补段之间没有加减速过程,从而使得运动更加平滑。运行CONTI_ENTER功能块后进入连续插补模式,加入要求的插补运动轨迹,使用LINE_START功能块启动连续插补运动,PMC6496以连续插补模式运行完所有运动轨迹。
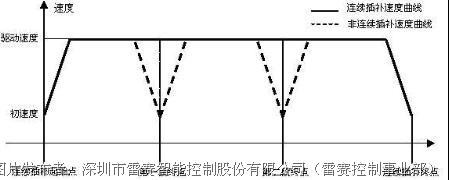
图3 连续插补运动
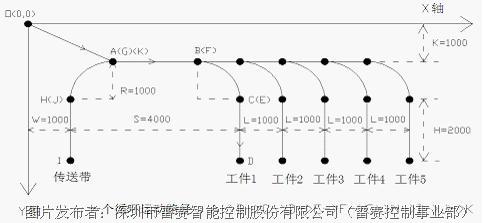
图4 机械手上下料运动轨迹
三 机械手上下料控制系统流程
绘制流程图,如图5所示。每次启动时,将抓取次数重置为0,抓取5次后结束。“夹紧”和“松开”为气缸动作。
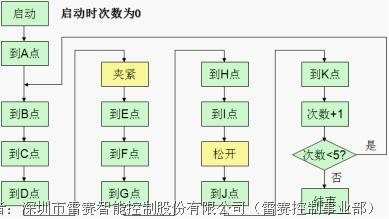
图5 机械手上下料流程图
四 机械手上下料控制系统的程序
机械手上下料控制系统程序如图6所示。
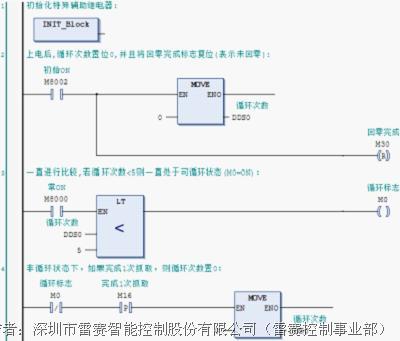
图6 机械手上下料程序(程序1-4节)
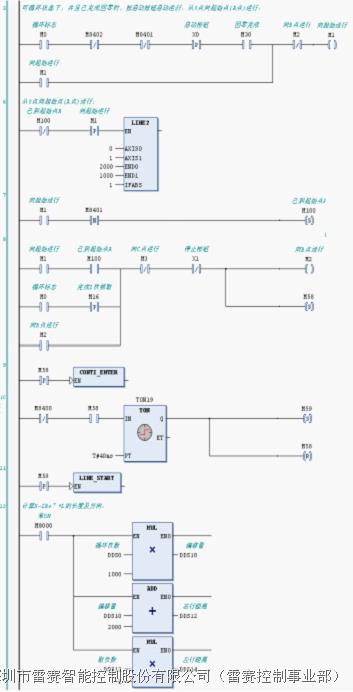
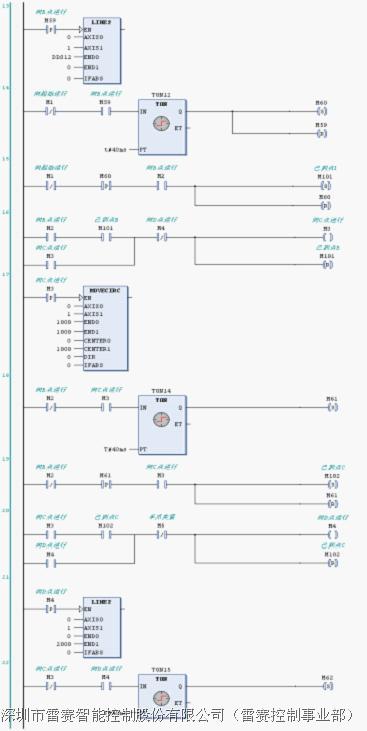
图6(续2) 程序5-22节
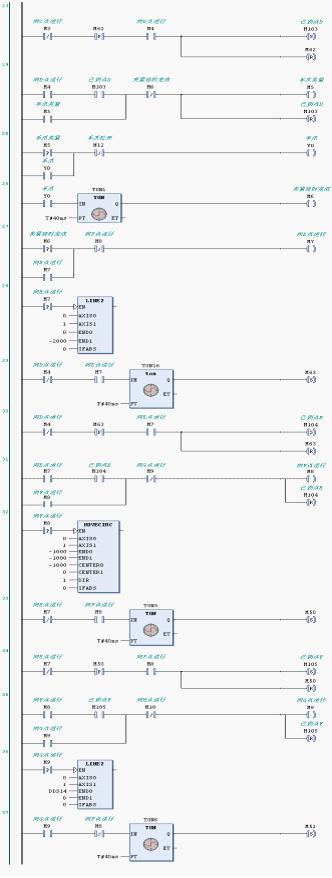
图9(续3) 程序20-37节

图6(续4) 程序38-49节
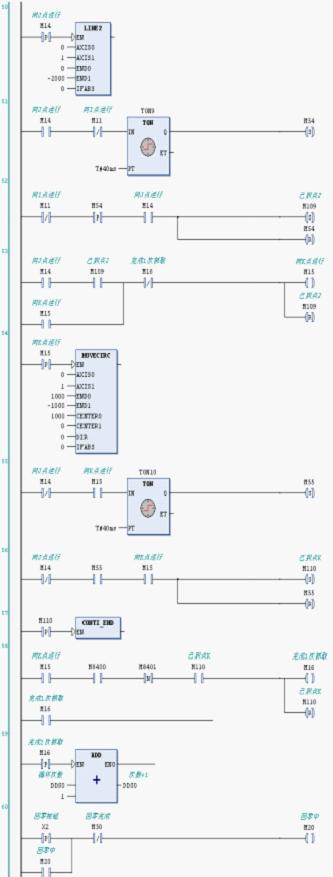
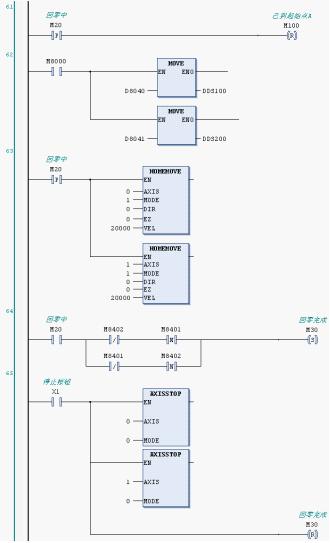
图6(续4) 程序50-65节
程序中所使用的几个关键运动指令功能块为PMC6496运动库的一部分,解释如下:
 1、MOVECIRC
1、MOVECIRC
描述:指定的两轴以当前位置为圆弧起点,按已指定的终点位置、圆心位置、插补方 向,执行圆弧插补运动。其功能块如图7所示。
参数:
EN:BOOL类型,使能端(Enable),指令块的驱动输入端。
AXIS0:指定参与圆弧插补的第一轴。
AXIS1:指定参与圆弧插补的第二轴。
END0:指定第一轴的圆弧终点坐标。
END1:指定第二轴的圆弧终点坐标。
CENTER0:指定第一轴的圆弧圆心坐标。
图8 点位运动功能块 CENTER1:指定第二轴的圆弧圆心坐标。
DIR:USINT(BYTE)类型,指定圆弧插补的方向。
IFABS:指定运动模式,0-相对运动,1-绝对运动。
2、PMOVE
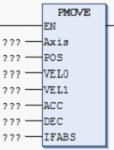 描述:指定轴按已设定的脉冲长度及方向、起始速度、最大运行速度、加速度、减速度以及运动模式执行点位运动。其功能块如图8所示。
描述:指定轴按已设定的脉冲长度及方向、起始速度、最大运行速度、加速度、减速度以及运动模式执行点位运动。其功能块如图8所示。
参数:
EN:使能端(Enable),指令块的驱动输入端。
Axis:指定轴号,范围为0~3轴。
POS:指定点位运动的目标位置,即脉冲数,正、负号分别表示正方向和负方向。比如,-10000表示负方向运动10000个脉冲的长度。
VEL0:指定起始速度(即初速度),单位:脉冲/秒。
VEL1:指定运行速度(即最大速度),单位:脉冲/秒。
图9 回原点运动功能块 ACC:指定加速度,单位:脉冲/秒2。
DEC:指定减速度,单位:脉冲/秒2。
IFABS:指定运动模式,0-相对运动,1-绝对运动。
3、HOMEMOVE
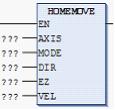 描述:指定轴按已设定的模式、方向、速度执行回原点动作。回原点完成后,当前坐标被清0,即视为原点(或称零点)。其功能块如图9所示。
描述:指定轴按已设定的模式、方向、速度执行回原点动作。回原点完成后,当前坐标被清0,即视为原点(或称零点)。其功能块如图9所示。
参数:
EN:使能端(Enable),指令块的驱动输入端。
Axis:指定轴号,范围为0~3轴。
DIR:指定回原点方向,1-正向,0-负向。
MODE:指定回原点模式。
EZ:只对模式4起作用,即反找原点时,EZ信号的个数。
VEL:指定回原点速度,单位:脉冲/秒。
4、LINE2
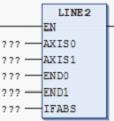 描述:指定的两轴按已指定的终点位置,及运动模式执行直线插补运动。其功能块如图10所示。
描述:指定的两轴按已指定的终点位置,及运动模式执行直线插补运动。其功能块如图10所示。
参数:
EN:使能端(Enable),指令块的驱动输入端。
Axis0:指定参与插补的第一轴,指定范围为0~3轴。
Axis1:指定参与插补的第二轴,指定范围为0~3轴。
END0:指定第一轴的目标位置,单位:脉冲数。
图10 轴直线插补功能块 END1:指定第二轴的目标位置,单位:脉冲数
VEL1:指定运行速度(即最大速度),单位:脉冲/秒。
IFABS:指定运动模式,0-相对运动,1-绝对运动。
五 总结
综上所述,PMC6496运动控制器具有运动控制功能多、处理I/O信号能力强、性价比高等优点;而且采用梯形图编程十分简单、方便,很容易上手;使用PMC6496可以轻而易举地完成各种自动化设备的复杂运动控制。
作者简介
赵向前 男,工程师 2009年哈尔滨工业大学机电学院毕业,从事自动化技术研发工作。
左 力 男,博士,高级工程师,1998年华中理工大学机械学院毕业,从事自动化技术研发工作。