


测距传感器让这辆车智能化
- 关键词:测距传感器
- 摘要:对复杂的工厂环境来说,不管是人工操作还是机器操作,安全都是不容忽视的问题。根据AGV小车在工厂的应用,AGV小车避障系统直接关系到AGV小车在运行过程的安全。
对复杂的工厂环境来说,不管是人工操作还是机器操作,安全都是不容忽视的问题。根据AGV小车在工厂的应用,AGV小车避障系统直接关系到AGV小车在运行过程的安全。

这种移动机器人之所以智能,其主要就是自主导航,而实现机器人自主导航有个基本要求——避障。下面让我们来了解一下移动机器人的避障,避障是指移动机器人根据采集的障碍物的状态信息,在行走过程中通过传感器感知到妨碍其通行的静态和动态物体时,按照一定的方法进行有效地避障,最后达到目标点。
从20世纪70年代末开始,随着计算机的应用和传感技术的发展,以及新的机器人导航算法的不断推出,移动机器人研究开始进入快车道。

实现避障与导航的必要条件是环境感知,在未知或者是部分未知的环境下避障需要通过传感器获取周围环境信息,包括障碍物的尺寸、形状和位置等信息,因此传感器技术在移动机器人避障中起着十分重要的作用。

避障使用的传感器主要有超声传感器、视觉传感器、红外传感器、激光传感器等。

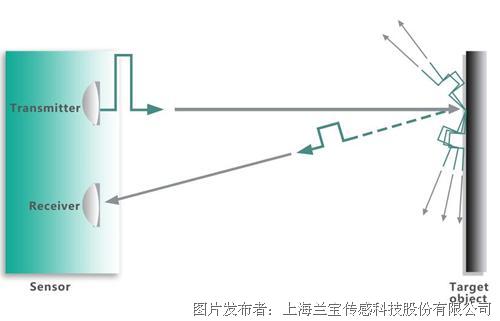
红外测距传感器的测量原理是当红外发射器按照一定的角度发射红外光束,发射管的发射信号,通过检测物反射回接收管。接收到的发射信号与接收到的补偿信号之间有一定的相位差,即时间延时,检测物距离传感器越近,相位差越小,延迟的时间也越小。光子行驶的距离=光速*光子行驶的时间,而光子行驶的时间与相位差成正比,由此就可以根据相位差计算出光信号行驶的往返路程,从而计算出传感器距检测物的距离。
而红外传感器的优点更是任意安装角度赋予的空间很大,检测的范围0.15米达到12米,对于不同背景颜色也是能轻松的处理,在-65℃的恶劣温度下照样能检测,抗振动能力强。
发布时间:2018年4月17日 11:40 人气: 审核编辑(何为)
更多内容请访问(上海兰宝传感科技股份有限公司)