


【智能伺服】智能伺服百科
供稿:黄石市科威自控有限公司
- 关键词:智能伺服,,运动控制,伺服驱动器
- 作者:科威自控
- 摘要:智能伺服属于伺服系统中的一部分,主要应用于高端装备、智能机器的核心控制部件。智能伺服能广泛应用于纺织机械、木工机械等领域。

智能伺服又称“可编程伺服驱动器”、“可编程伺服放大器”,是集伺服驱动技术、PLC技术、运动控制技术于一体的全数字化驱动器。其内部可进行梯形图编程,完成PLC的逻辑、数据运算,通过特有的运动控制指令,来实现多轴电机同步控制功能。智能伺服属于伺服系统中的一部分,主要应用于高端装备、智能机器的核心控制部件。智能伺服能广泛应用于纺织机械、木工机械等领域。
工作原理
目前主流的智能伺服均采用DSP(数字信号处理器)作为控制核心,包含运动控制算法,PLC算法、伺服控制算法等。功率板通过桥式整流电路将交流电转为直流电,再经过三相正弦PWM逆变来驱动三相同步交流伺服电机,驱动板则以DSP为核心,对伺服各模块状态负责信号采集、AD转换、信号监控、数据处理、数据输出。通过内核程序对不同等级任务进行调度来完成通信、PLC、PWM脉宽调制、AD转换、脉冲输入采集等功能。
智能伺服功能
智能伺服是集伺服驱动技术、PLC技术、运动控制技术于一体的全数字化驱动器。其功能也结合了PLC、运动控制器以及伺服驱动器三者的优势。
一、PLC功能
智能伺服内置PLC技术,基于IEC61131-3国际标准,以梯形图语言的形式进行编程的。可独立使用梯形图编程,完全替代上位机控制器。

PLC指令包含了基本逻辑指令、步进顺控指令、流程指令、传送与比较指令、四则逻辑运算指令、循环移位指令、浮点数运算指令、触点比较指令、PID控制指令。
二、运动控制器功能
智能伺服内置运动控制技术,以 PLC Open 为背景进行的模块化研发,以梯形图为编程语言,以指令的形式进行编程的。拥有插补、回原点、点动、追剪/滚切、电子凸轮、电子齿轮等17条运动控制指令,这些指令的应用能够使得运动控制系统更加简洁。
(一)插补指令
插补指令是单轴插补指令,在下一插补周期直接插补输出,故需要考虑会不会位置偏差,机械抖动等问题,这个是对轴进行直接插补,不会受轴极限参数限制。
(二)回原点指令

回原点指令在运动控制指令里应用较广,分类也较多。能伺服的回原点指令有原点搜索功能,故可在左限位内任意位置回原点,碰到近点开关后可选择两种模式停车。
(三)追剪/滚切指令
追剪/滚切正程指令是底层根据设定参数进行制表的指令,通常都是以上位机生成为主,同时提供上位机制表和底层制表,底层制表对于更换参数生成新的表格更为实用。
追剪/滚切其实都是电子凸轮的延伸.这里所针对的都是有同步区的模型,如果没有同步区,或者同步区不是脉冲形式,如以时间为同步关系结束,则这里不太适用。
(四)电子凸轮指令
电子凸轮指令是对指定软件虚拟输出轴(AXV)做从轴,与时间/主轴位置成函数关系(电子凸轮)。主轴变化时,从轴依电子凸轮曲线运动。电子凸轮输出指令实际上是对已经制表生成的曲线进行输出,可根据实际情况对曲线进行偏移量输出,同时还支持事件输出,事件输出可以用于切刀,充气打码等用途,支持多种齿合和脱离方式。
(五)电子齿轮指令
电子齿轮指令是伺服和运动控制器必备指令之一,在对于与主轴同步或等效运动时,由于中间存在传动机械,如减速机等,为了达到同步效果,那么需要电子齿轮来进行调节。目前大多支持4轴的电子齿轮比输出,同时伺服本体有专用的电子齿轮固件。
三、伺服功能
伺服功能包含了三环切换、PID控制,滤波调节器、虚拟示波器、增益等功能。
(一)三环切换
智能伺服的三环切换能达到在切换过程平滑,无需停机,提高了生产效率,为复杂运动控制提供了捷径。在三环控制系统中,位置环作为最外环,速度环其次,转矩环为最内环。外环可以控制内环输出,反之内环工作时,外环不一定工作。如伺服处于转矩环运行时,速度环和位置环不工作。
从内环切换到外环工作时,切换后的状态主要由外环确定,外环的输入即是内环的输入。
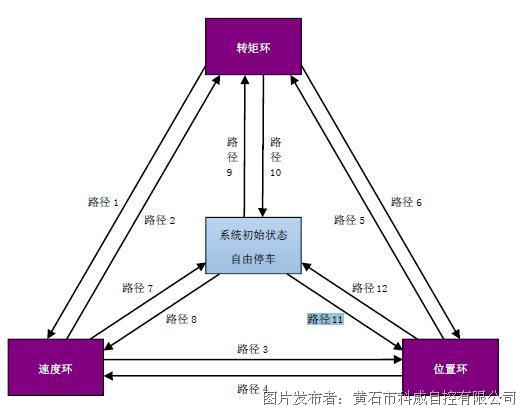
从外环切换到内环工作时,则存在一定的延时。会以切换瞬间对应的内环参数作为输入,继续进行后续的内环操作。如从位置环切换到转矩环时,系统将实测转矩作为当前给定,经过一定惯性滤波过渡到实际给定值。
最典型的应用案例就是机器人,工况现场的机器人随时可能工作在三环中的任意一环。例如要求机器人从 A 走到 B,拿起一个重物,随后在一定时间内达到 C。这就要求机器人的工作模式为位置环→转矩环→速度环,且动作连续不中断。
(二)PID控制
智能伺服内置 PID 控制可以适应各种复杂的控制、多变量的控制。
比例(P)控制就是将差值进行成比例的运算,它的显著特点就是有差调节,有差的意义就是调节过程结束后,被调量不可能与给定值准确相等,它们之间一定有稳态误差,增加比例将会有效减小稳态误差并增加系统响应,但容易导致系统激烈震荡甚至不稳定。
积分(I)控制就是系统的输出与输入误差信号的积分成正比关系。为了消除系统的稳态误差,需要进行积分控制。如果稳态误差大,则积分环节的变化速度大,这个环节的正比常数的比例倒数则为积分时间常数。积分时间常数越小意味着系统的变化速度越快,所以同样如果增大积分速度(也就是减小积分时间常数)将会降低控制系统的稳定程度,直到最后出现发散的震荡过程。随着时间的增加,积分项也会随着时间的增加而加大,从而推动系统输出增大使态误差进一步减小,直至为零。
微分(D)控制就是系统的输出与输入误差信号的微分(即误差的变化率)成正比关系。微分控制具有超前和预测的特性,在超调尚未出现之前,就能提前给出控制作用。以改善系统在调节过程中的动态特性。
(三)滤波调节器功能
智能伺服内置滤波调节器,在系统中主要滤除输入信号中的噪声和毛刺,保证信号变化平顺。以使伺服运行平稳,不致于出现瞬间由于信号量的突然变化而导致机器有损伤性的运行。为使操作简洁内部设置滤波时间常数。
减少时间滤波常数可加快系统响应速度,但容易发生过冲。
增大时间滤波常数可有效抑制过冲,但系统响应速度变低。主要用于随动的平稳启动和在大电子齿轮比下抑制转速剧烈波动。
(四)示波器功能
智能伺服内置虚拟示波器,是利用高性能、高效灵活的软件来搭建的,用来完成智能伺服内部各项性能的数据检测的虚拟仪器。虚拟示波器具有波形触发、存储、显示、测量、波形数据分析处理等独特优点。
(五)增益功能
智能伺服增益功能包含了位置前馈增益、位置增益、速度增益、转矩增益。
1.位置前馈增益
位置前馈增益设定值越大时,表示在任何频率的指令脉冲下,位置滞后量越小,即可有效减少位置偏差量。对于刚性低的机械及负载惯量比较大的机械,需加大位置前馈增益数值,这样在较小位置偏差就能有较快的响应,尤其在需要高速响应的场合。增大位置前馈增益设定值能够提高系统的高速响应特性,但会使系统位置不稳定,容易产生振荡。
2.位置增益
加大位置增益数值,可提高对负载变化的位置响应特性,缩短定位时间。位置增益数值不能设置过大,否则容易产生过量调节,产生振动和噪音。反之降低位置增益数值会导致位置调节变慢,导致位置偏差。
3.速度增益
加大速度增益数值可加快系统对于转速的调节速度,使转速变化平稳,增加系统刚性。但设置过大可能引起转速振荡。
4.转矩增益
加大转矩增益数值可加快系统对于转矩的调节速度,使转矩变化平稳,增加系统刚性。但设置过大可能引起转速振荡。
智能伺服优势
(1)智能伺服将传统PLC功能集成到伺服驱动器中,拥有完整的通用PLC指令,使用独立的编程软件进行编程,整个系统更加高效简洁。
(2)智能伺服内置的运动指令,支持一轴闭环,三轴开环同步运动,开环轴滞后1ms;即“四轴同步”。
(3)智能伺服驱动支持瞬时最大3倍过载,速度环400HZ,刚性10倍。位置环调节周期1ms,动态跟随误差小于4个脉冲。
(4)在系统设计中,要用到三环切换时,智能伺服能做到三环无扰数字切换。在梯形图环境下重构伺服电流环、速度环、位置环结构参数,实现多模式动态切换工作。
(5)在梯形图的条件下可以完成数控插补运算,自动生成曲线簇算法,集成G代码运动功能(如S曲线、多项式曲线等)。例如:在背心袋制袋机中的加减速控制采用指数函数作为加速部分曲线和采用加速度平滑、柔性较好的四次多项式位移曲线作为减速部分曲线,从而使得机器更加快速、平稳。
(6)拥有完善的硬件保护和软件报警,可以方便的判断故障和避免危险。
应用领域
智能伺服能广泛应用于纺织机械、木工机械、包装机械、印刷机械等领域。
