


海德汉 ECI/EQI 1100系列感应式多圈旋转编码器
关键字:-----紧凑,耐用并满足SIL,3安全要求
- 产品简介:
- 机床、机器人和一般自动化系统的用户对高性能及低成本的要求在不断提高。这需要使用高动态性能、结构紧凑和能效高并有安全功能的驱动。
产品介绍
机床、机器人和一般自动化系统的用户对高性能及低成本的要求在不断提高。这需要使用高动态性能、结构紧凑和能效高并有安全功能的驱动。由于不同应用的要求不尽相同,安全功能的编码器不仅是高端机床驱动所需,也是一般应用所需。海德汉推出的第3代无内置轴承ECI/EQI 1100系列37 mm直径的感应扫描的旋转编码器能满足高安全应用对高动态性能和节能型伺服驱动的要求。

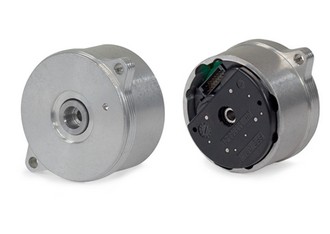
图1:
ECI 1119 / EQI 1131 FS – 37 mm直径的感应式旋转编码器
新一代感应扫描技术
海德汉最新成功开发的ASIC芯片为直径37mm的感应式旋转编码器提供了安全功能。该编码器的安全性能达到SIL 2,3级PL d。如果为控制系统增加一些措施,安全性能甚至能达到SIL 3,4级PL e。另一个优点是机械防松功能,它能避免轴和联轴器的松动。
而且,系统精度比上一代产品提高两倍,达到� 120角秒。由于这些编码器采用对污染不敏感的感应扫描原理,因此具有较高耐用性特点。全新感应式旋转编码器ECI 1119 FS(单圈)和EQI 1131 FS(多圈)还兼容ECN/EQN 11xx FS系列内置轴承光学扫描旋转编码器。该编码器在机械和电气方面的兼容性确保了它能为应用的控制要求提供所需可扩展性,因此能最大限度减少电机型号数量。
与上代产品相比,特别是被显著放宽的机械允许公差,例如允许的轴向窜动量放宽了2倍。为简化机械安装的检查,编码器生成一个代表配合尺寸的数值,伺服变频器通过EnDat接口能读取该值。全新感应式旋转编码器还有编码器温度和电机温度监测功能,它分别用编码器内的温度传感器和外部温度传感器测量温度。旋转编码器处理这两路温度传感器信号,而且不中断控制环工作,后续电子电路通过EnDat 2.2接口用数字方式读取该数据。
比较光学扫描编码器的控制质量
下面我们以实际电机为例比较新一代感应式旋转编码器与上一代编码器及光学扫描的EQN 1135旋转编码器。为确保电机影响最小,我们选择扭矩波动极小的电机进行测量。 在电机的输出轴处安装高精度角度编码器(测量精度优于� 1角秒),用于评估驱动系统的精度和速度稳定性。
系统精度
系统精度是评估能否适应特定应用要求的重要条件。图2是三种编码器的精度记录。与EQI 1130相比,全新EQI 1131感应式旋转编码器的短行程测量误差明显减小。正如预期,光学扫描的EQN 1135旋转编码器的精度最高。

图2:
感应式旋转编码器与光学扫描旋转编码器单圈转动的典型精度测量值
控制环的动态性能
控制环动态性能测试采用电机的电流、转速和位置级联控制方式。为保持比较好的兼容性,所有被测编码器都用相同的控制参数设置(控制周期时间100 �s,速度控制单元比例增益1400 1/s)。图3显示三种编码器速度控制闭环的幅值频率响应(伯德图)。采用这三种编码器的驱动系统的控制带宽都达到大约600 Hz。未检测到谐振点。可实现的动态性能只取决于控制单元的参数设置。海德汉旋转编码器实现的大带宽让系统拥有了更高性能,整个系统可实现的动态性能不再受编码器制约,只是受复杂控制路径的制约。

图3:
速度控制闭环中感应式旋转编码器与光学扫描旋转编码器的频率响应
速度控制单元的高增益设置保证了电机轴的机械干扰能被很好地抑制。然而,也明显扩大了旋转编码器的测量误差。因此,对于高性能的伺服电机,决定速度稳定性的主要因素是编码器质量而不是电机的机械质量(例如扭矩波动)。图4显示不同转速时被控电机的速度稳定性。全新感应式旋转编码器的速度稳定性与光学扫描的旋转编码器相比只有微小差异。因此,全新感应式旋转编码器对污染不敏感的扫描方式和极好的抗振性能(定子:≤ 400 m/s�,转子:≤ 600 m/s�)的特性使它成为生产型机床的理想选择。全新感应式编码器速度波动极小的主要原因是它的短行程位置误差小。

图4:
采用感应式和光学扫描旋转编码器电机的速度稳定性
在驱动中,分辨率不足体现在被测速度的量化误差上。量化误差主要发生在高频处,这是因为速度是(量化)位移的导数。高频误差被速度控制环带入到电流控制环中。电流误差导致电机的力和扭矩变化,进而触发机械共振频率,还表现为误差扩散。而且,也造成电机损耗的增加,影响能耗。因此,较高的位置分辨率是高动态性能驱动的必然选择。
位置控制环的位置误差
根据应用任务,旋转编码器的精度及/或重复精度都关系到定位精度。名义位置附近的位置误差是因为驱动系统存在误差和被测对象的量化误差(位置,速度和电流)。如果用最高可能速度接近一个位置,就需要高增益的速度控制环和位置控制环。然而,这也意味着实际值测量误差将被带入到控制环中。为保证在定位模式中达到最高性能,也需要用海德汉公司提供的信号质量最好的编码器。
编码器信号误差对于保持电机轴在特定位置发挥着重大作用。在数字化位置值前编码器中不可避免存在误差和位置分辨率不足造成量化误差都使控制环产生实际值偏差。闭环控制通过扭矩设置使电机在所需位置附近进行微量运动以尽可能补偿这些偏差。这些运动如图5所示。正如预计,由于光学扫描编码器的有效分辨率最高,因此表现最好。

图5:
感应式和光学扫描旋转编码器在位置控制模式中的位置误差
总结和展望
最新开发的第3代感应式多圈旋转编码器ExI 11xx帮助用户在一个设备中实现最高达SIL 3级的功能安全系统。其机械(安装)及电气(EnDat 2.2接口)与ExN 11xx光学扫描旋转编码器兼容,因此事实上可应用于所有已有应用范围。所有用户都能受益于它的优异控制性能,例如高精度,高动态性能,高效率,坚固的设计和允许的安装公差大。
详细信息表
表1:旋转编码器对比
