前言
抽油井采油是石油工业传统的采油方式之一,也是迄今为止在采油工程中一直占主导地位的采油方式。随着油田开发的深入,一部分抽油井因油层压力降低、供液能力变差等原因,致使油井产液量逐年递减,成为低产低能井,也就是间抽井。由于油井供液不足,致使深井泵工作效率低,油井生产极其不稳定,设备大部分时间处于无功消耗状态下,使得管理难度加大,在正常的工作制度下,很难对此类油井进行合理高效的管理,而且油井在长时间无功状态下运行造成设备的无谓磨损,对安全生产也造成了一定的影响。
1.背景介绍
传统的抽油井巡检方式是人工巡检,巡检周期长、准确性不高,造成现场抽油机井况不能及时反馈,影响正常生产。针对人工巡检的缺点,大部分油田开始采用自动化设备对井况参数进行采集,目前大部分数据采集设备只是将现场的工艺参数(示功图、油压、套压、油温、启停状态等)传输到中心控制室,在中心控制室进行后台分析处理。此类设备主要以数据采集为主,定期形成报表(日报表、月报表等),无法对间抽井井况进行实时在线诊断,也就无法对间抽井的产液量进行有效的计量,不能使自动化设备更好的服务于数字化油田管理。
近几年随着高性能RTU技术、抽油机井况诊断技术、功图量油技术的发展,在技术上可以将油井诊断与计量在RTU中完成,实现抽油机井的实时诊断与计量,及时掌握抽油机井的生产情况,下面介绍这几种技术。
1.1高性能RTU技术
随着电子技术的发展,RTU核心芯片从单片机发展到了多核处理器,从8位微处理器发展到32位微处理器,从汇编语言发展到嵌入式系统开发,从几KB内存发展到几十MB内存,从几MHZ主频发展到几百MHZ主频,从单一的RS232串行通信发展成RS232、RS485、CAN接口、网络接口、USB接口等多种通信方式。这些发展使RTU在处理速度、处理能力、通信方式上得到极大的提高,也提高了RTU解决问题的能力。
1.2抽油机井况诊断技术
抽油机井况诊断技术的研究,一直是国内外采油工程技术人员的课题,及时、准确地了解抽油系统的工作状况,对提高抽油效率、降低机械采油成本和提高油井产量都具有非常重要的意义。抽油井井况诊断技术始于上世纪20年代,经过90多年的发展,目前已走向成熟,主要通过计算机系统采用模式识别技术,对采集到的示功图进行分析,提取关键特征,实现对抽油井的井况诊断。
1.3功图量油技术
“功图量油”油井计量技术是依据游梁机-深井泵工作状态与油井产液量变化关系,即把有杆泵抽油系统视为一个复杂的振动系统,该系统在一定的边界条件和一定的初始条件(如周期条件)下,对外部激励(地面功图)产生响应(泵功图)。然后对此泵功图进行分析,确定泵的有效冲程、泵漏失、充满程度、气影响等,计算井下泵排量,进而求出地面折算有效排量。
2.设计方案
整个系统实现的主要方案为通过设计高性能RTU,将抽油机井况诊断算法、功图量油算法嵌入到RTU中,通过对采集的抽油井示功图等数据进行分析,得到抽油机井的井况和产液量。系统分为三部分进行设计,下面按各部分设计分别介绍。
2.1 RTU设计
RTU按照工业级产品进行设计,内嵌Linux操作系统、IEC61131-3开发环境、C语言开发环境,可以对系统进行在线升级。硬件按照EMC 3级及UL标准进行抗干扰及安全设计,提高整个产品的可靠性。外围有丰富的IO接口、通讯接口(8AI 8DI4DO 2AO 1RS232 1RS485 1RS232/RS485 1RJ45),满足抽油机井况诊断与计量的需要。RTU设计分为硬件和底层软件两部分。
2.1.1 RTU硬件设计
RTU硬件设计采用核心板+外围IO电路的模式,核心板模式适合开发不同IO点的RTU,使得RTU性能更可靠,兼容性更强。
核心板设计
核心板采用Atmel的SAM9处理器作为核心处理器,该处理器技术指标为。
● 处理器速度最大达240MHz,内存最大64Mbytes,并行FLASH最大达4Gbytes。
● SAM9处理器采用的是ARM926EJ-S核,ARM926EJ-S内核拥有ARM7核基本功能外,还扩展了定点DSP指令和JAVA指令支持。
● SAM9处理器采用的是5级流水线,在原来ARM7基础上增加了指令高速缓存和写缓冲技术,大大增加了指令处理速度,降低了指令处理复杂度。
● SAM9处理器支持虚拟内存管理(MMU),可以运行LINUX、WINCE这样的大操作系统。
● SAM9处理器多达217个管脚,外围接口种类多、数量多,支持更多的应用。
核心板的原理图如下
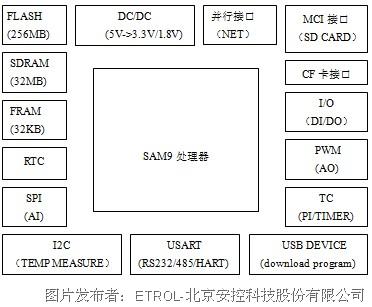
图1 核心板原理图
SAM9核心板硬件包括几个方面:
a) 主CPU单元:主控制器是ATMEL公司生产的SAM9系列控制器AT91SAM9RL64,主频240MHz主频。包括各种外围接口,方便扩展,简化应用。
b) 电源单元:核心板需要5V电压源,然后由核心板上的电源转换单元转换为3.3V、1.2V,供核心板使用。
c) 存储器单元:存储器单元包括两部分,一部分是内存部分,另一部分是闪存部分,AT91SAM9RL64控制器已经有SDRAM内存接口和闪存硬件接口,本核心板内存为32Mbytes,闪存为256Mbytes。
d) 外扩铁电FRAM可用于掉电时数据的保护。
e) 日历时钟单元:RTC单元是控制器自带的,但是必须外接电池供电,否则断电后RTC时间设置丢失。本控制已经留有电池供电接口。
f) 温度检测单元:本核心板带有温度检测,检测核心板环境温度。
g) 调试接口单元:核心板上自带简易JTAG调试接口,方便程序调试。
h) 通信接口单元:核心板上包括串口通信和USB通信接口,供程序下载与调试实用。
外围电路设计:
RTU外围IO电路采用隔离设计,AI、DI、AO、DO、RS232、RS485、Ethernet等接口经过隔离后接入到核心板。RTU按照EMC3级标准设计,提高RTU的可靠性。外围电路原理图如下。
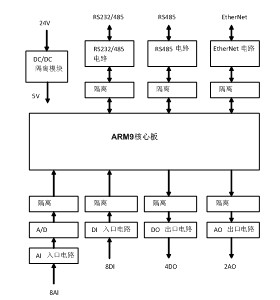
图2 外围电路原理图
外围电路包含如下几个方面:
a) 提供3个串行通信接口电路,其中两个为RS485,一个为RS232或RS485可选则接口,每个串行接口电路都为隔离接口,并有抗瞬变干扰设计。
b) 提供1个网络通信接口电路,接口电路为隔离接口,并有抗瞬变干扰设计。
c) 提供8路4~20mA模拟输入(AI)接口,AI信号经输入接口电路到AD转换器,再经数字隔离到主控芯片。AD选用16位AD芯片。AI入口电路具有抗干扰设计,如可恢复保险、瞬变管、压敏电阻保护等。
d) 提供8路数字输入(DI)接口,DI信号经入口电路后,再经隔离到主控芯片。DI入口电路具有抗干扰设计,如瞬变管、压敏电阻保护等。
e) 提供4路数字输出(DO)接口,主控芯片DO经隔离后驱动输出FET管,可外接继电器控制各类设备。选用具有高耐压、大电流FET管作为输出管。
f) 提供2路4~20mA模拟输出(AO)接口,AO信号经隔离后到达AO输出电路,经V/I转换后输出。输出管选用高耐压、大电流的FET管。
2.1.2 RTU运行程序设计
RTU运行程序由Linux操作系统、驱动程序、IEC61131-3编程环境、功图采集、诊断、量油、第三方应用程序等组成。第三方应用程序开发既支持IEC61131-3开发环境,又支持C语言开发环境,并且可以进行在线升级。
Linux操作系统有很多特点适合作为RTU内嵌的操作系统,特点如下。
● Linux是基于Posix操作系统标准设计的,因此很多程序可以不用修改或很少修改就很容易的移植到该系统下;编程接口方便,熟悉,类似于PC机的程序开发。
● Linux支持各种文件系统,而且支持各种文件格式;
● Linux支持如今绝大多数的网络协议栈,而且这些协议栈也非常稳定,接口通用,可以满足各种网络需求;
● 基于Linux上的应用软件有很多,比如说数据库,web服务器,图形系统库,文件传输,系统统计信息,各种分析工具等。
● Linux支持多种编程语言编程(C/C++、SHELL、java等),这给编程人员带来很大方便。
RTU运行程序由内层到外层如下图。
从内层到外层,由启动程序、内核、驱动、应用程序、第三方程序,有嵌入式开发到应用开发,设计人员也由专业开发人员到应用开发人员,这样的结构便于推广RTU在各行业的应用。
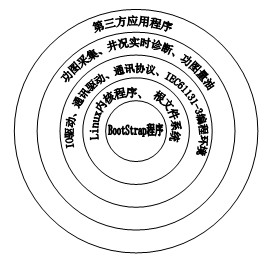
图3 系统程序层次图
a) BootStrap程序:BootStrap程序是上电时首先需要运行的程序,该程序主要用来初始化CPU和一些硬件,例如NAND FLASH,SDRAM等。
b) Linux内核程序、根文件系统:zImage1.00程序为Linux内核程序,sysfs1.00.img程序为系统根文件系统,包含各种命令和程序,包括用户程序。
c) 系统驱动程序:包含了AI、DI、DO、AO驱动程序,RS232、RS485、Ethernet通信驱动程序;Modbus RTU/ASCII、Modbus TCP/UDP/IN TCP/IN UDP、DNP3等通信协议,也包含了IEC61131-3标准编程环境支持程序。
d) 系统应用程序:包含了功图采集、井况诊断、功图量油等程序,在系统底层程序基础上进行开发,系统应用程序可以进行在线升级。
e) 第三方应用程序:为了适应不同地区产品特殊性需要,可以由第三方根据现场实际情况编写特殊功能程序,编程环境符合IEC61131-3标准,支持LD、FBD、IL、ST、SFC五种程序语言。
2.2 抽油机井况诊断与计量设计
2.2.1井况诊断设计
抽油机井况诊断是以模式识别为基础的人工智能诊断法,主要以泵功图为诊断依据,着重在提取泵功图的特征,包括几何、形状、力学等方面的特征,并经欧氏距离、绝对差距离、费歇分类器、模糊综合评判等分类器进行分类判别,实现抽油系统的井况诊断。建立包括泵正常工作、固定凡尔漏失、供液不足、气体影响、抽喷、双凡尔漏失、泵基本不工作、抽油杆断脱等十余种抽油系统工况的诊断知识库。
井况诊断流程框图如下。
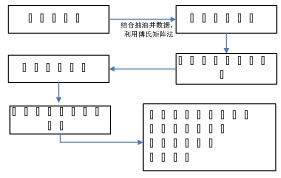
图4 井况诊断流程框图
a) 示功图采集:
通过安装在悬绳上的负荷传感器采集油井的动态负荷,通过安装在游梁上的角位移采集游梁运行的角度进而计算出悬点位移的变化,位移与负荷的二维图形就是示功图,示功图也可以采用无线示功图方式进行采集。
b) 泵功图转换:
计算各级杆端功图采用傅氏矩阵递推的形式,推导简便,表达简捷,三角级数求和计算全部采用快速递推求和法,将三角函数的调用次数降到最低,大大降低了运算速度,通过用泵功图计算产液量可以消除抽油杆柱的变形、杆柱的粘滞阻力、振动和惯性等的影响。
c) 特征值提取:
通过灰度矩阵获取示功图的特征值,泵功图的灰度矩阵是在其网格矩阵的基础上形成的.其形成过程分为四步:
● 功图标准化,为了便于比较油井各类工矿相除泵功图量纲对数据的影响,首先将泵功图进行无量纲处理,形成标准化功图;
● 将长方形分为网格,通常采用个网格,将此网格初始化为“0”;
● 令示功图边界穿越的网眼灰度均赋“1”;
● 边界内部每远离边界一格其灰度值增加一级,外部按等高线的方式赋值,只是每远离边界一格其灰度值减少一级,搜索边界的方式是按列进行,最终获得功图网格矩阵。
灰度统计特征,依据数理统计原理,取灰度矩阵的6个统计特征,分别是灰度的均值、方差、偏度、峰度、能量、熵。
d) 专家会诊模块:
泵功图的实际工况与专家库中参考故障泵功图的统计特征量之间进行灰关联分析,关联度越大,实际井况与相应的参考故障越接近,从而建立抽油井故障诊断模型。根据与专家库进行灰关联分析,可以诊断出泵正常工作、固定凡尔漏失、供液不足、气体影响、抽喷、双凡尔漏失、泵基本不工作、抽油杆断脱等十余种抽油系统工况。
e) 诊断结果输出:
通过诊断不仅能得到抽油机井的工况,也可以得到抽油机运行的一些数据,如抽油机曲柄扭矩曲线、抽油杆受力分析、泵效分析、采油参数分析等。
扭矩曲线
根据抽汲同期内等时间间隔的测试时间序列计算相应曲柄转角?的扭矩因素,由相应各点的悬点测试载荷值计算各点的载荷扭矩Mp,计算各点曲柄平衡扭矩Mc,求出各点净扭矩M,以横坐标为曲柄转角,纵坐标为扭矩,绘制出扭矩曲线。
受力分析
计算各级杆柱顶部的最大与最小应力,根据各级杆柱顶部示功图可得出各级杆柱承受的最大载荷和最小载荷,算出各级杆的最大与最小应力。
泵效分析
通过计算电机输入功率、井下泵功率(有效功率)、光杆功率,可以得到抽油机系统的系统效率(有效功率/电机输入功率)、地面系统效率(光杆功率/电机输入功率)、井下系统效率(有效功率/光杆功率)。
采油参数分析
通过对油井工况的诊断,可以判断油井的供液能力(泵的充满度),也就可以依据参数对冲次进行相应的控制,通过自动控制抽油机的冲次(利用变频器实现),来实现油井供液能力与理论设计排量匹配的问题,并且考虑抽空的极限情况,实现停机关井,间歇抽油。这样即节约电能又可避免过度抽汲的破坏作用(液击和磨损)。
2.2.2功图法量油
通过采集每个冲程的示功图数据,根据示功图数据的变化,分布每个冲程泵内液体的充满程度,把泵筒作为计量容器,计算出每个冲程的抽汲量,经过累加,计算出单井的产液量。
功图量油流程框图如下。
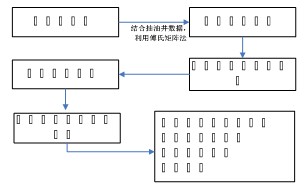
图5 功图量油流程框图
a) 凡尔开闭点及有效冲程获取:
各种泵况其功图的几何特征都突出表现在阀开启的位置变化,所以阀开启点和关闭点的位置确定,以及对阀开启滞后和关闭超前产生的无效冲程造成的排量损失的计算都很重要。凡尔开闭点的确定主要通过泵功图各点的曲线斜率的变化极值。
泵功图中游动凡尔开闭点之间的水平距离即柱塞的有效冲程。
b) 压力梯度计算:
计算抽油井油管内的压力分布和密度分布,对于掌握抽油机井油管内气液两相流的流动型态、计算抽油泵的效率及抽油机井的产液量极为重要。
c) 计算漏失系数:
取压缩气体的过程为多变过程,依据上述计算出的抽油机井内的压力分布,计算泵的吸入口压力和排出口压力后,便可以计算出泵的吸入因数、排出因数和充满因数。再根据对吸入过程和排出过程漏失因数的公式,最后求出泵的产液量。
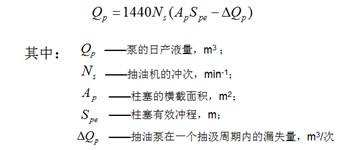
d) 产液量计算:
通过以上步骤获得有效冲程和漏失系数后,通过下面公式即可得到抽油机井的产液量。功图量油计算公式
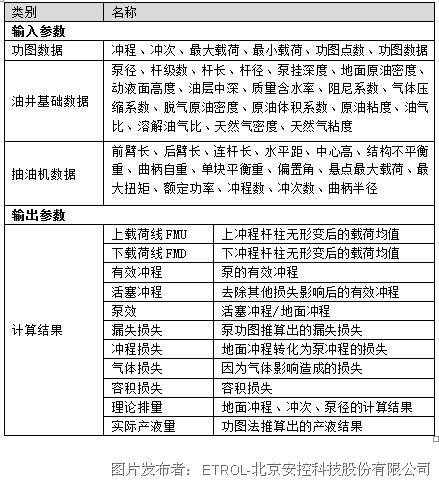
2.2.3井况诊断和功图量油参数维护
井况实时诊断与功图量油运算中需要抽油井的基础信息。这些信息可通过上位机软件或者现场进行设置。整个系统采用参数同步技术使上位机数据库中参数与现场控制器参数保持同步。这些参数包括油井的冲程、冲次、杆长、杆径、杆级数、泵径、油管内径、油气比、地面原油密度、脱气原油密度、泵挂深度、动液面深度、油管内径和抽油机基础信息等。
参数表如下:
3.RTU实现功能
内嵌抽油机井况诊断、功图量油的RTU,可以实现下面功能。
● 动态图形采集功能
可按随意设定时间间隔,采集一个冲程内的负荷变化、位移变化、电流变化、有功功率变化,形成示功图、电流图、功率图,作为井况诊断分析的基础数据。
● 数据采控功能
监视抽油机生产工况,采集油压、套压、油温、启停状态、手自动状态等现场参数,远程智能控制抽油机启停。
● 节能控制功能
通过外接变频器可以实现自动调节抽油机冲次,具有空抽控制、间抽控制和连喷带抽控制功能,可使抽油井、抽油机运行在最佳工作状态,起到节能增产的作用。
● 诊断、安全功能
通过抽油机实时在线诊断技术,可判断当前油井的实际井况如出沙、结蜡、供液不足、漏失、碰杆、脱杆等工况。对油杆卡杆、断杆、盘根漏油、油管漏失、电机过流、断相等进行停机安全保护与报警。
● 抽油井产液量计算功能
通过功图量油技术,实现抽油机井产液量的计算,计算出瞬时产液量、累计产液量。
● 通讯功能
可对数据参数实现现场、远程监视和设定,兼容性好,采用标准的通讯协议,可以连接无线数传电台、GPRS、CDMA等串口无线设备,也可以连接3G路由器、无线网桥、WIFI等网络通讯设备。
● 大数量存储功能
每口井可以存储一个月功图数据(每天144幅功图)、产量数据,通过无线方式现场取数或中控室读取;每口井可以存储 4320条功图数据。功图存储间隔10分钟~2小时任意设置。如果中控室通讯中断,通讯恢复后也可以通过中控室把通讯中断期间的功图数据采集到数据库中。
● 电参数采集功能
可实现电机电力参数的采集,包括三相电压、电流、有功功率、无功功率,功率因数,有功电能、无功电能,根据产液量和耗电量得出吨油耗电量,为核算采油成本提供基础数据。
● 错误判断功能
自动判断抽油机工作是否正常,给出报警信息,同时根据预先的设定采取不同的控制动作。
4.优点分析
采用实时井况诊断技术、功图量油技术,结合高性能RTU技术,开发抽油机井口用RTU,对抽油机井进行实时的井况诊断、智能控制,使抽油机运行在最优的工作状态。其显著的优点有:
● 实时性强
对井况进行实时诊断分析,及时响应现场井况的变化,实时进行详细而准确的井下分析,例如:油泵充满状况、出砂、气锁、液面、产量等。
间抽井实时采集示功图,对每幅示功图采用功图量油技术,得到抽油机井的瞬时产液量、累计产液量,实现连续计量。可以有效的解决间抽井出液无规律,不易计量的问题。
● 控制智能化
通过分析,它可以自动确定最佳的生产时间,自动启动或停止抽油设备(间抽、连喷带抽等控制),自动保持最合理的液面,并对抽油设备进行良好的保护。使抽油设备在最优化的状态下运行,降低综合能耗。
● 运行模式灵活
RTU既可以纳入SCADA系统,实现远程控制,也可以独立运行,不依赖于中心控制室对它的控制,单独完成所有功能。
5.结论
在RTU内实现抽油机井井况诊断与计量,很好的解决了间抽井管理上的难题,能有效的对间抽井的井况、产液量进行实时的数据分析,为数字化油田生产管理提供一种有效的手段。

手机扫描二维码分享本页

工控资讯APP 安卓版下载

工控资讯APP IOS版下载
我来评价
| 评价: | 一般 | ||