




台达机器视觉DMV在机械手自动拾放系统中的应用
供稿:中达电通股份有限公司
- 关键词:机器视觉,,机器人,,业机器人
- 作者:李景昌
- 摘要:目前在生产线上的搬运工业机器人大都是通过预先编程,并按固定的路径执行动作,目标物体的初始位置和目标位置都是固定的,机器人只是完成点到点的动作。
目前在生产线上的搬运工业机器人大都是通过预先编程,并按固定的路径执行动作,目标物体的初始位置和目标位置都是固定的,机器人只是完成点到点的动作。而对于拾取输送线上位置不确定的物体如面包,袋装食品等物体,沿固定轨迹运行的机械手就无能为力了。为保证搬运工业机器人顺利完成这类在线拾放的工作任务,需引入视觉进行识别定位,引导工业机器人完成对工件的拾取和放置等操作。使用视觉引导的机械手在动作执行速度,放置精度和重复稳定性方面都较人工有很大优势。
一、 机械手自动拾放系统原理
在一些传统的行业,例如袋装食品生产、陶瓷生产中,需要对位置不确定的物体如面包,袋装食品等进行拾取,而大多数的搬运工业机器人都只能通过预先编程,执行固定路径的拾取操作,对这一需求无能为力。为此,企业需采用大量人力来完成搬运作业,不仅增加人力成本,生产效率也低。工业机器人要实现随放随取的操作,就需要引入视觉进行识别定位。使用视觉引导的机械手在动作执行速度,放置精度和重复稳定性方面都较人工有很大优势。
由台达DMV机器视觉系统与机械手组合的机械手自动拾放系统,具有高度的灵活性,可以帮助行业用户轻而易举的完成繁琐复杂的搬运作业。该系统通过以太网通讯的方式,把检测数据传送到机械手系统,并由机械手实现目标物体的拾放。台达DMV1000控制器,拥有高精度摄像头,百万像素级别镜头以及红色LED环形光源,可以精准的引导工业机器人完成对工件的拾取和放置等操作。目前,从各行业使用的反馈情况可知,该系统不仅提升了生产效率高,而且灵活性好。此外,只需借由简单的视教动作,该系统即可实现多种不同规格产品的检测,帮助企业大大降低了人力成本。
二、系统介绍
1、系统配置:
根据产品生产的要求,从经济性和系统可靠性的角度出发,选择控制系统的元器件。机器视觉系统可选择:1)台达DMV1000控制器;2)80万像素摄像头;3)25mm 百万像素级别镜头;4)红色LED环形光源。
2、系统控制图
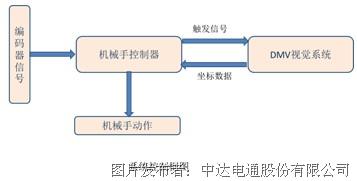
图1、系统控制图
3、台达DMV1000视觉控制器特点
1) 内建操作系统,小型化体积,无需搭配PC操作;
2) 流程化操作接口,降低使用者设定上的复杂度;
3) 提供多样检测功能,满足大部份应用需求;
4) 工业级设计,符合于震动、高温等生产环境;
5) 支持双摄影机同步检测 (80万画素之1394a摄影机);
6) I/O、RS232、Ethernet、USB等多样外部通讯方式;
7) SD 记忆卡储存装置;
8) 提供操作器及PC软件设定接口;
9) 已拥有大量的图形工具,包括面积测量、边缘位置、边缘计数、 边缘宽度、边缘节距、边形比对、边缘角度、斑点侦测、影像强度、污点检测、边缘追踪及宽度追踪。
其检测系统使用了专用的视觉LED光源,主要有三大特点:
1) 使用寿命长,一万到三万小时左右。如果选用频闪的功能,LED寿命将更长,而且LED的通断速度快,可在10微秒达到最大亮度;
2) LED有不同的颜色不同的波长,用户可以根据检测对象的特征选用不同波长的光源,以突出检测特征从而达到理想的效果;
3) 稳定性好,LED灯采用直流供电,克服了交流供电时出现的工频频闪现象,保持了获取图像的一致性。图1为系统控制图。
三、方案实施:
1、工作流程:
当目标物体从流水线出来,以随机的姿态进入机器视觉的视野后,由上位机触发视觉系统进行取像,然后把图像信息传输给图像处理器GPU。通过图像处理器的运算,计算出产品的重心位置(XY坐标和角度θ)。比如:机器视觉检测出视野里出现了7个目标物体,这7个物体的位置数据将通机器视觉自带的通讯口与上位机进行通讯,最后由上位机发送指令给机械手执行动作。
此外,台达DMV产品还支持RS232/RS485、Ethernet(10BASE-T)和台达DVP PLC-Link等通讯方式。市面上几家大的机械手厂家包括均支持DMV的通讯接口。经过程序优化,机械手的抓取速度可达到200个/分钟,定位误差小于0.5mm,角度误差小于1°。
2、技术性能及系统参数
检测内容:产品中心的XY位置及角度θ
通讯方式:通过以太网发送产品的位置数据到上位机(PLC,工控机)
FOV(检测视野):200×150mm
WD(工作距离):800mm
3、 DMV控制系统设计
作为位置测量系统的DMV,除供电电源外,触发信号和位置坐标值输出都是通过以太网口与上位机进行通讯,图2为DMV的接线端子图。

图2 、DMV的接线端子图
四、方案效果
该检测系统经过合适的选型、较好的硬件配置及完善的程序设计,完全满足用户要求。此外,该系统还具备以下几个特点:
1) 加工生产效率高(大约每秒钟拾取3个产品);
2) 灵活性好,通过简单的视教动作,即可实现多种不同规格产品的检测;
3) 大大减轻工人劳动强度。
随着国内人力成本的增长以及加工企业对品质,产能要求的不断提升,对机器视觉系统介入生产领域取代人工进行测量,检测的需求将呈现出快速增长的趋势。据统计,欧美日等发达国家制造业的机器人使用率较10年前有近10倍的增幅。实际上,在精密电子行业,使用机器视觉,机械手进行产品尺寸测量,外观检测,对位等应用已非常成熟,在一些高精度的对位应用里,机器视觉产品的测量精度已大大超载人工检测的分辨率和精度。