亿维CPU124E在吸板机中的应用
- 关键词:亿维,CPU124E,吸板机
- 摘要:亿维CPU124E,支持亿维自主开发的UN120L系列专用运动控制库,其运动控制库指令丰富、使用简单方便的优势深受广大用户喜爱,UN120L系列专用运动控制库与使用说明书可在亿维官网中进行下载,本文主要简单介绍一下CPU124E在塑胶吸板机中的应用。
一、行业概述
在传统塑胶注塑工厂中,塑胶板注塑成型后,需经过一套切割工艺。切割机加工效率在10s/Pcs左右,一般常需4个工人对切割机下料。随着人口红利逐渐减少,人工成本不断攀升的情况下,使用伺服下料机代替人工下料成为最物美价廉的解决方案。
根据客户需求,亿维PLC CPU124E(订货号UN 124-2AE23-0XB8),本体自带14点数字量输入、10点数字量输出,并集成两路20kHZ高速脉冲输出,非常适用于此方案。
亿维CPU124E,支持亿维自主开发的UN120L系列专用运动控制库,其运动控制库指令丰富、使用简单方便的优势深受广大用户喜爱,UN120L系列专用运动控制库与使用说明书可在亿维官网(www.unimat.com.cn)中进行下载,本文主要简单介绍一下CPU124E在塑胶吸板机中的应用。

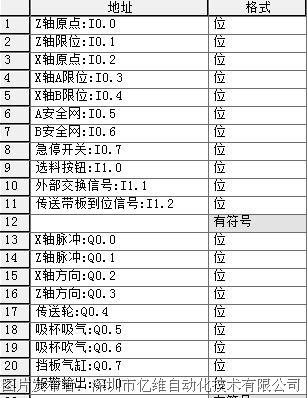
二、I/O分配
CPU124E晶体管输出型的最大输出电流为0.75A,所以驱动大负载的电磁阀、线圈等需要使用中间继电器,避免烧坏端子。

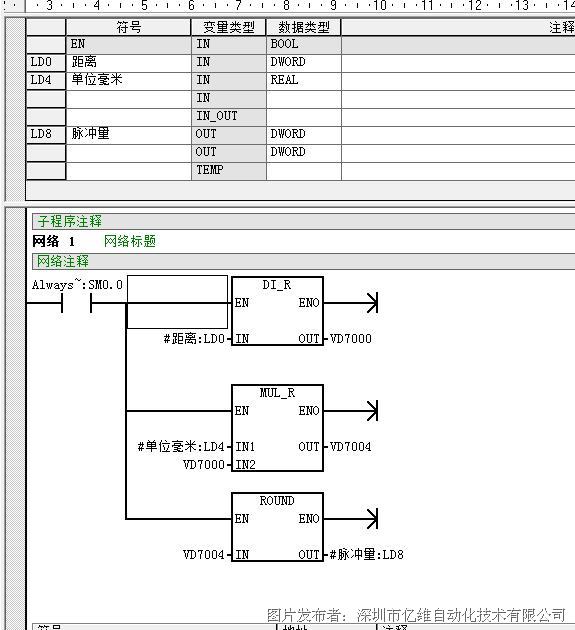
三、PLC程序
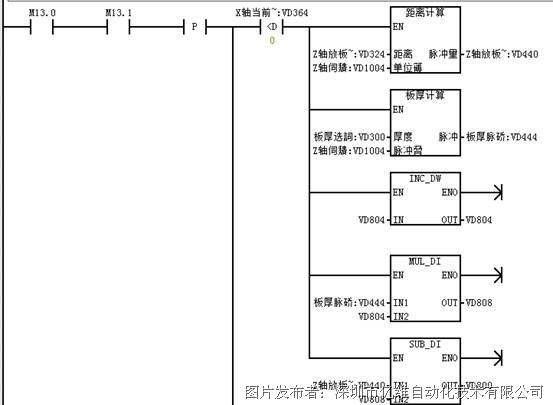
在编写运动控制程序之前,如果频繁重复使用一个计算过程,例如伺服导程与脉冲计算,可以先编写一个带参数返回的转换程序(如下图),这样程序可以更简洁。
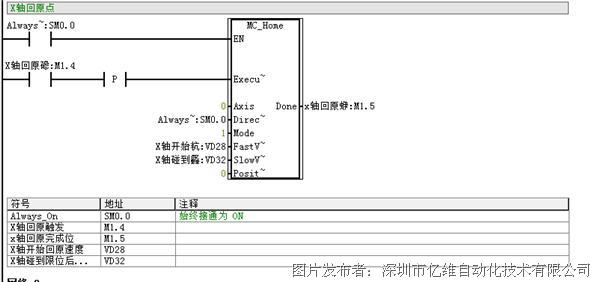
回原点:回原点流程:垂直轴(Z轴)回零完成再回水平轴(X轴),亿维UN120L系列专用运动控制库含有4种回原点方式,因为客户Z轴使用上限位作为回原DOG信号,所以MC_HOME库指令中,回原方式1最符合客户需求;
1.先回Z轴
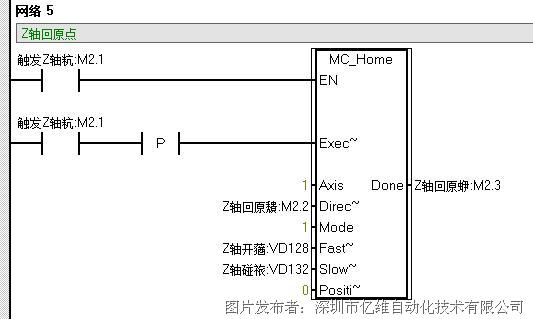
2.判断Z轴回原点完成
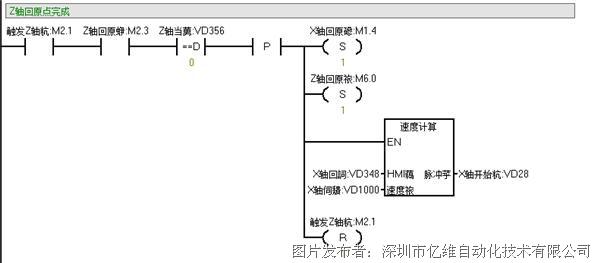
3.回X轴
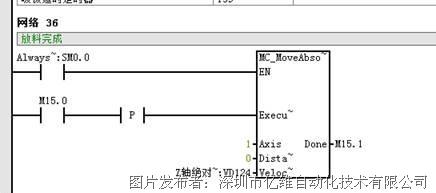
自动运行:自动运行工艺主要流程如下
零点→取料等待位→取料→零点→选择工位→X轴到放料→Z轴走到放料位置→放料→缩回Z轴→回零循环
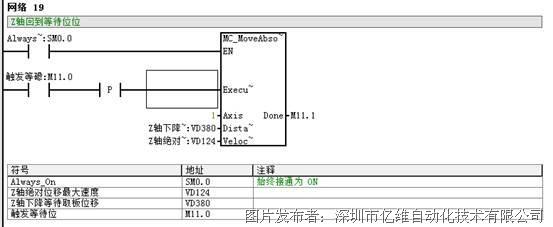
1.取料等待位
从HMI获取位置取料点参数(浮点数),转换为脉冲与频率,当运动控制之前先调用转换程序转换数据;
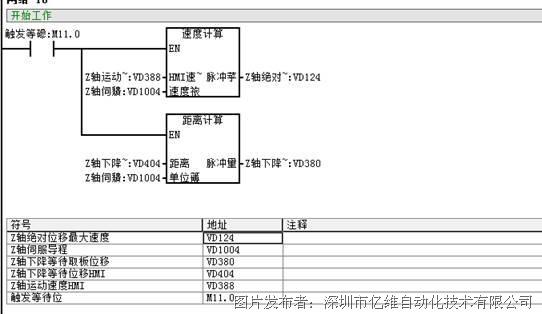
Z轴到等待位
2.取料
料到位信号为ON,伺服机械手开始取料、计算下降的位置。
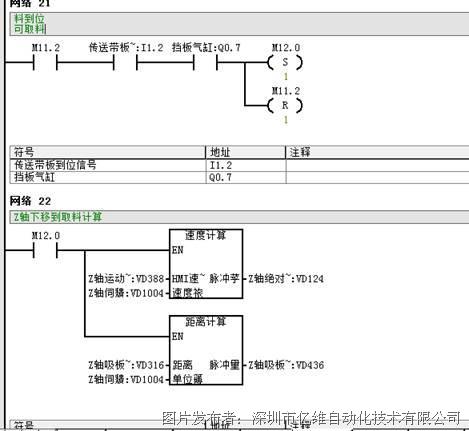
下伸到取料位置

3.取料完成
取料完成后添加一个延时(时间可在HMI设定,浮点数)延时完成后缩回Z轴
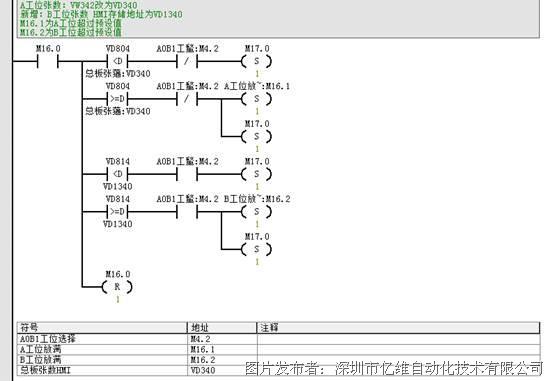
4.选择工位
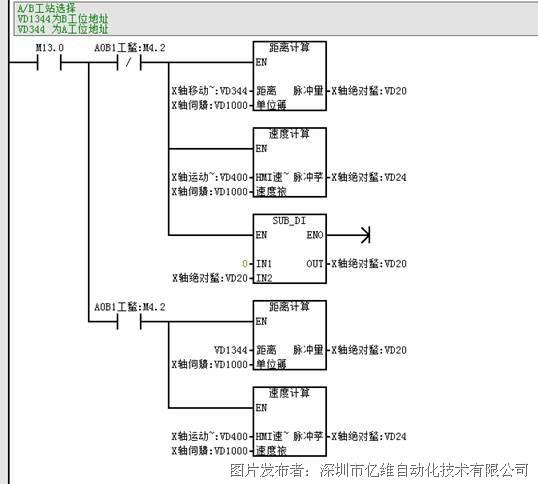
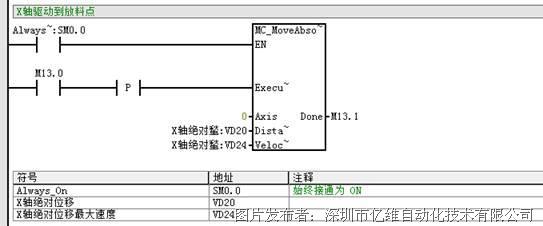
4.放料
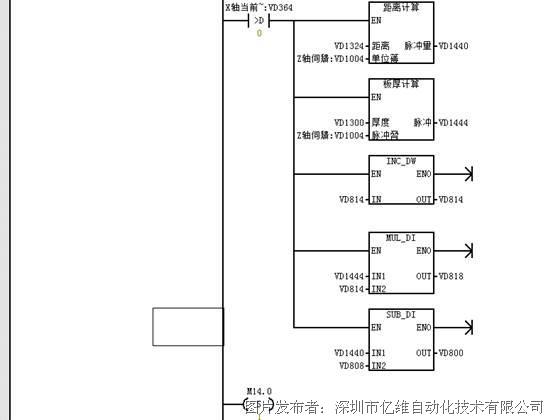
当前放置计算,HMI可调节当前已放置板的张数
5.放料
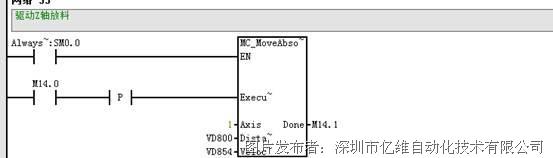
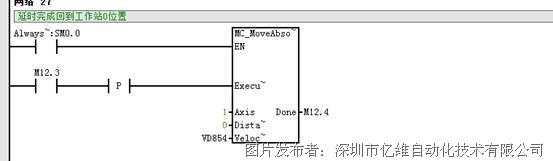
6.回到初始位置
判断是否循环
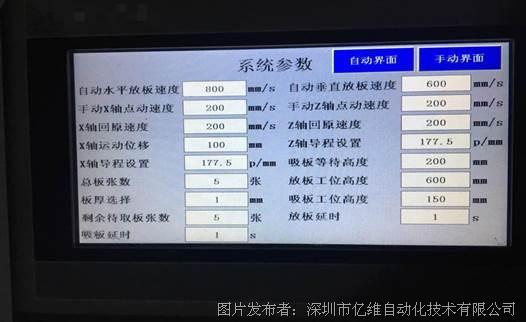
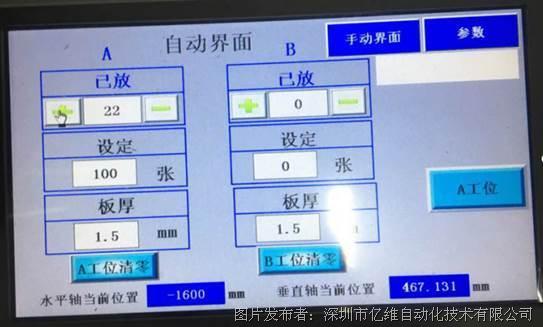
四、触摸屏设置
触摸屏使用亿维触摸屏,选择通信协议为Unimat PLC PPI协议即可。
1.自动界面设置
2.HMI参数设置。
一般储存地址为V区且设置V区为断电保持区,确保断电参数能够保持。